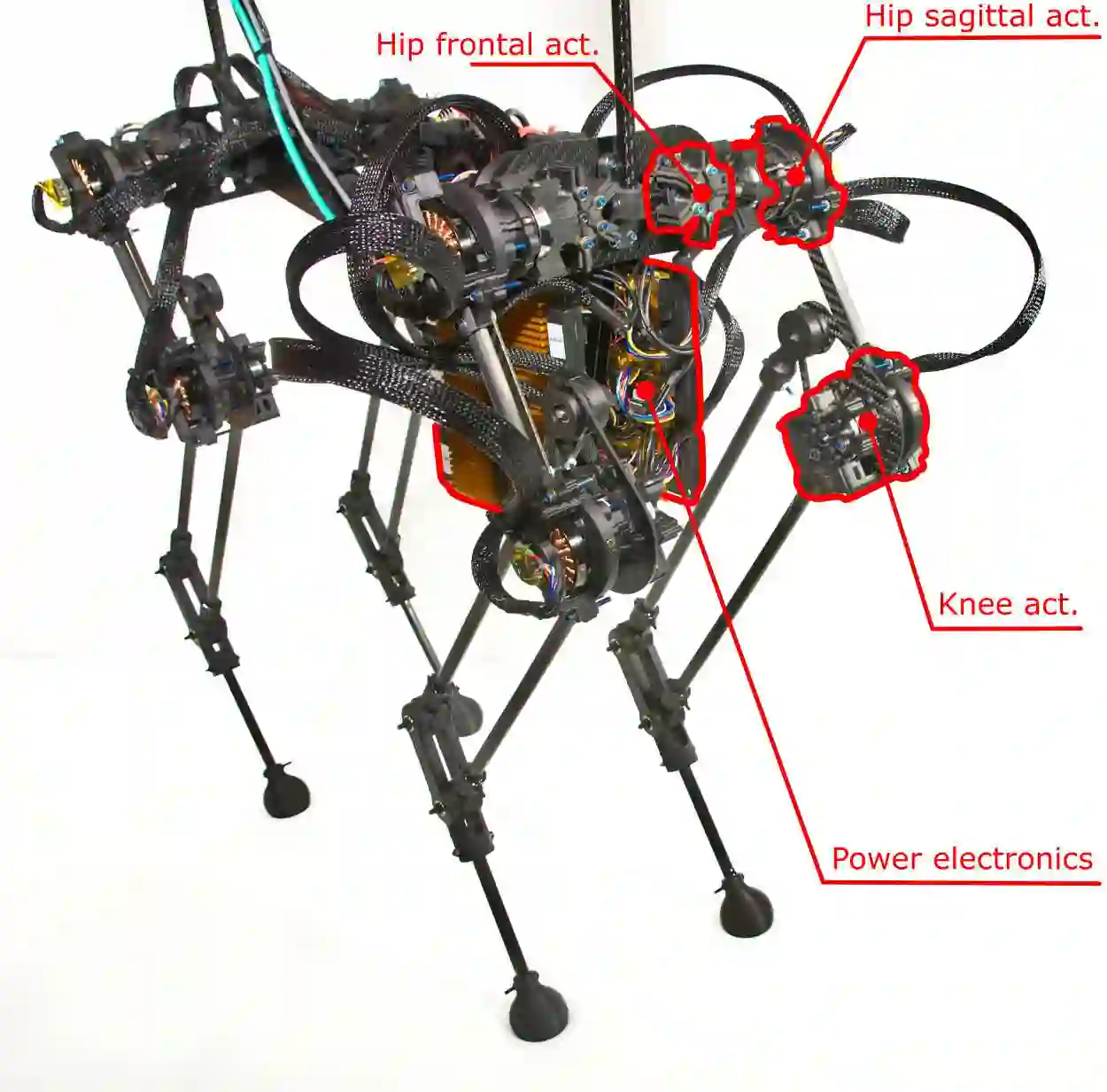
We are seeking control design paradigms for legged systems that allow bypassing costly algorithms that depend on heavy on-board computers widely used in these systems and yet being able to match what they can do by using less expensive optimization-free frameworks. In this work, we present our preliminary results in modeling and control design of a quadrupedal robot called \textit{Husky Carbon}, which under development at Northeastern University (NU) in Boston. In our approach, we utilized a supervisory controller and an Explicit Reference Governor (ERG) to enforce ground reaction force constraints. These constraints are usually enforced using costly optimizations. However, in this work, the ERG manipulates the state references applied to the supervisory controller to enforce the ground contact constraints through an updated law based on Lyapunov stability arguments. As a result, the approach is much faster to compute than the widely used optimization-based methods.
翻译:我们正寻求对腿式系统的控制设计范式,这种系统可以绕过依赖于这些系统中广泛使用的重型机载计算机的高成本算法,同时又能够通过使用费用较低的优化框架来匹配它们能够做的。在这项工作中,我们介绍了我们的初步结果,即一个名为\ textit{Husky Carbon}的四重机器人的建模和控制设计,该机器人正在波士顿东北大学开发。在我们的方法中,我们利用一个监督控制器和一个清晰的参考督导员来执行地面反应力限制。这些限制通常是使用费用高昂的优化手段加以强制执行的。然而,在这项工作中,ERG通过基于Lyapunov稳定性论点的最新法律,操纵了对监督控制员的州级参考,以实施地面接触限制。因此,这种方法比广泛使用的优化方法要快得多。