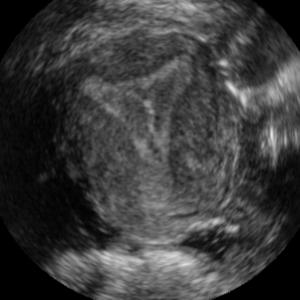
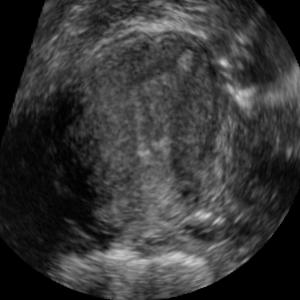
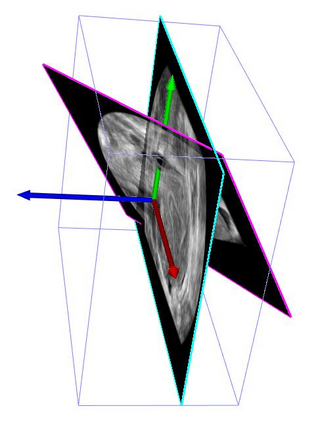
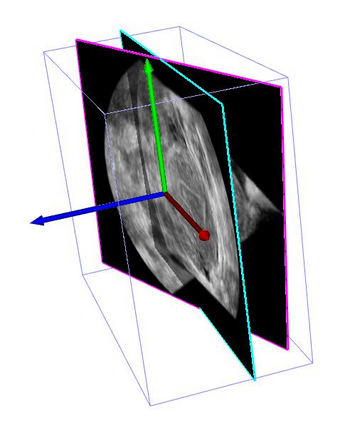
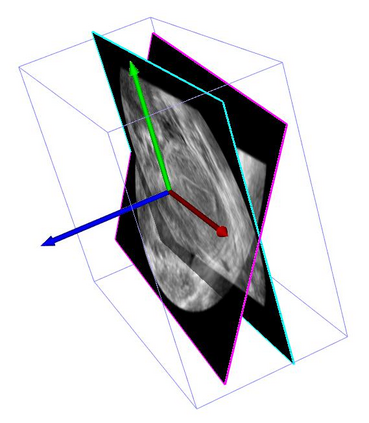
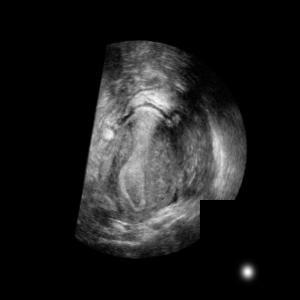
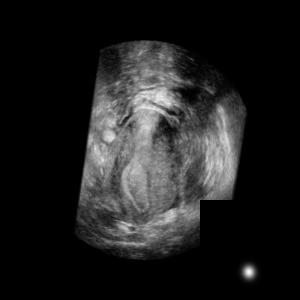
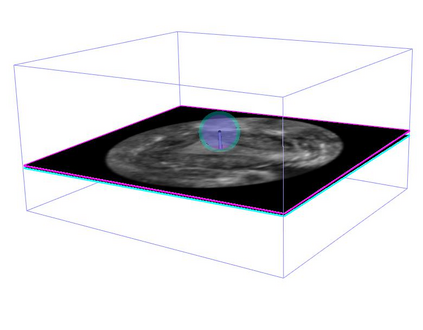
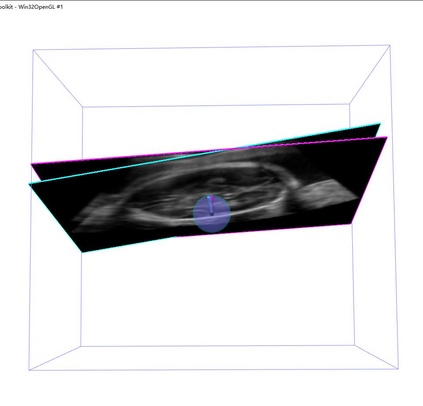
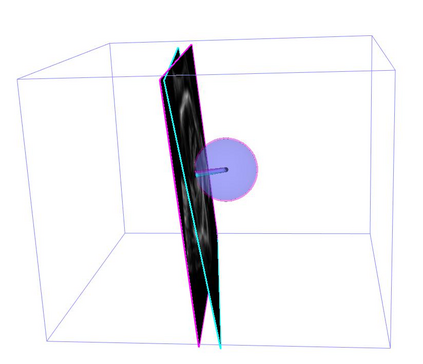
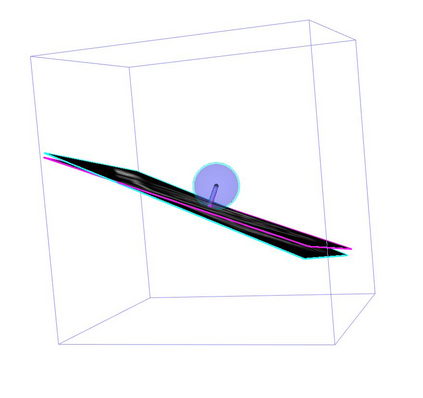
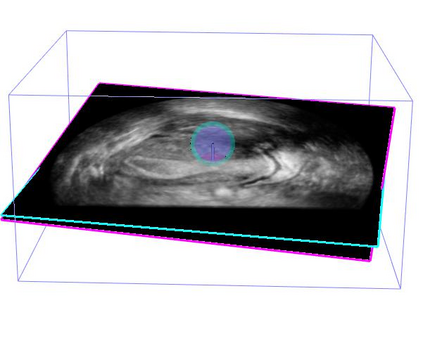
Standard plane (SP) localization is essential in routine clinical ultrasound (US) diagnosis. Compared to 2D US, 3D US can acquire multiple view planes in one scan and provide complete anatomy with the addition of coronal plane. However, manually navigating SPs in 3D US is laborious and biased due to the orientation variability and huge search space. In this study, we introduce a novel reinforcement learning (RL) framework for automatic SP localization in 3D US. Our contribution is three-fold. First, we formulate SP localization in 3D US as a tangent-point-based problem in RL to restructure the action space and significantly reduce the search space. Second, we design an auxiliary task learning strategy to enhance the model's ability to recognize subtle differences crossing Non-SPs and SPs in plane search. Finally, we propose a spatial-anatomical reward to effectively guide learning trajectories by exploiting spatial and anatomical information simultaneously. We explore the efficacy of our approach on localizing four SPs on uterus and fetal brain datasets. The experiments indicate that our approach achieves a high localization accuracy as well as robust performance.
翻译:标准平面( SP) 本地化对于常规临床超声( US) 诊断至关重要 。 与 2D US 相比, 3D US 可以在一次扫描中获得多个查看平面, 并提供完整的剖面, 加上冠冕平面 。 然而, 3D US 人工导航 SP 是困难和偏颇的, 因为方向变化和搜索空间巨大。 在此研究中, 我们引入了一个新的强化学习框架( RL ), 用于3D US 的自动超声波( US) 。 我们的贡献是三维美国 。 首先, 我们将 SP 本地化作为 RL 的正切点问题, 以重组行动空间并显著缩小搜索空间 。 其次, 我们设计了一个辅助任务学习战略, 以增强模型在搜索中识别非 SP 和 SP SP 的微妙差异的能力 。 最后, 我们提出一个空间分析奖赏, 以有效指导在 3D 中利用 空间 和 解剖面信息 学习轨迹 。 我们探索了 4 本地化 4 4 方法的有效性 。