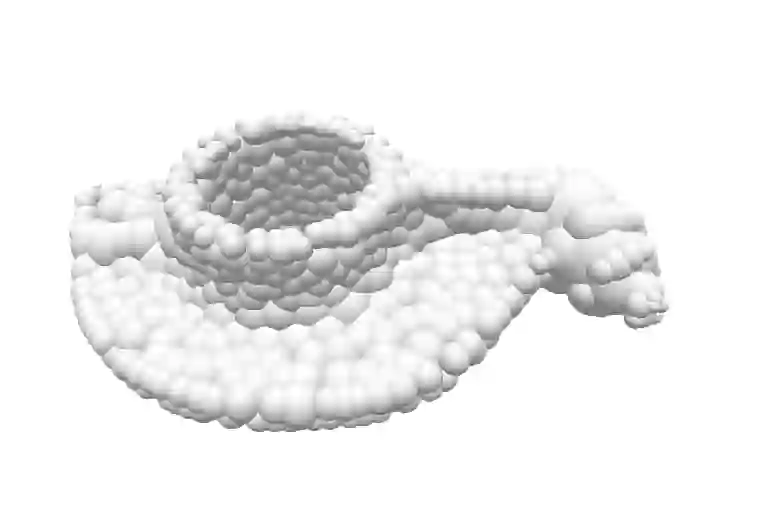
Implicit representations of geometry, such as occupancy fields or signed distance fields (SDF), have recently re-gained popularity in encoding 3D solid shape in a functional form. In this work, we introduce medial fields: a field function derived from the medial axis transform (MAT) that makes available information about the underlying 3D geometry that is immediately useful for a number of downstream tasks. In particular, the medial field encodes the local thickness of a 3D shape, and enables O(1) projection of a query point onto the medial axis. To construct the medial field we require nothing but the SDF of the shape itself, thus allowing its straightforward incorporation in any application that relies on signed distance fields. Working in unison with the O(1) surface projection supported by the SDF, the medial field opens the door for an entirely new set of efficient, shape-aware operations on implicit representations. We present three such applications, including a modification to sphere tracing that renders implicit representations with better convergence properties, a fast construction method for memory-efficient rigid-body collision proxies, and an efficient approximation of ambient occlusion that remains stable with respect to viewpoint variations.
翻译:在这项工作中,我们引入了介质字段:由介质轴变形(MAT)产生的一个实地功能,该功能为一系列下游任务立即有用的基本 3D 几何提供了信息。特别是,介质字段将3D 形状的本地厚度编码起来,并使得O(1) 向介质轴投射一个查询点。要建造介质字段,我们除了需要形状本身的SDF外,别无需要,从而可以将其直接纳入依赖已签字的距离字段的任何应用程序。与SDF支持的O(1) 表面预测一致,介质字段打开了全新一套高效、有形状操作的门。我们提出了三种此类应用程序,包括修改域跟踪,使隐含的表达更加接近性,为记忆高效的僵硬体碰撞前轴提供快速构建方法,以及有效近离子近距离近,在视野变化方面保持稳定。