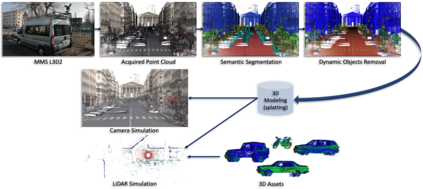
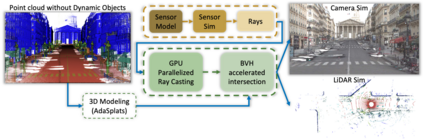
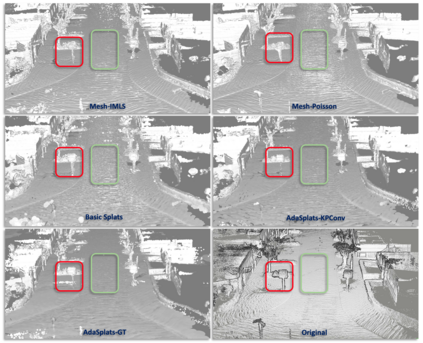
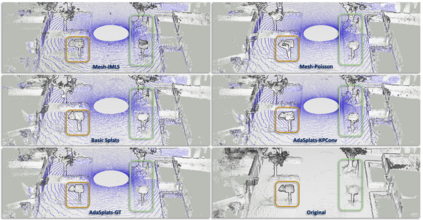
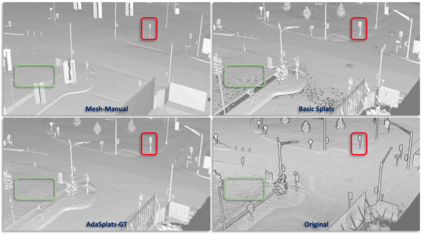
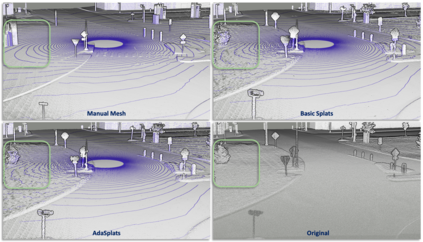
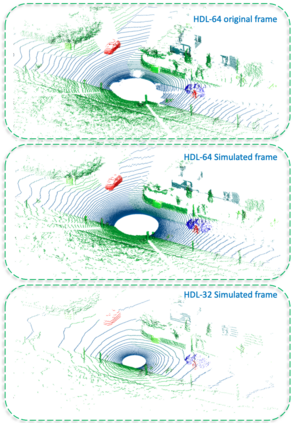
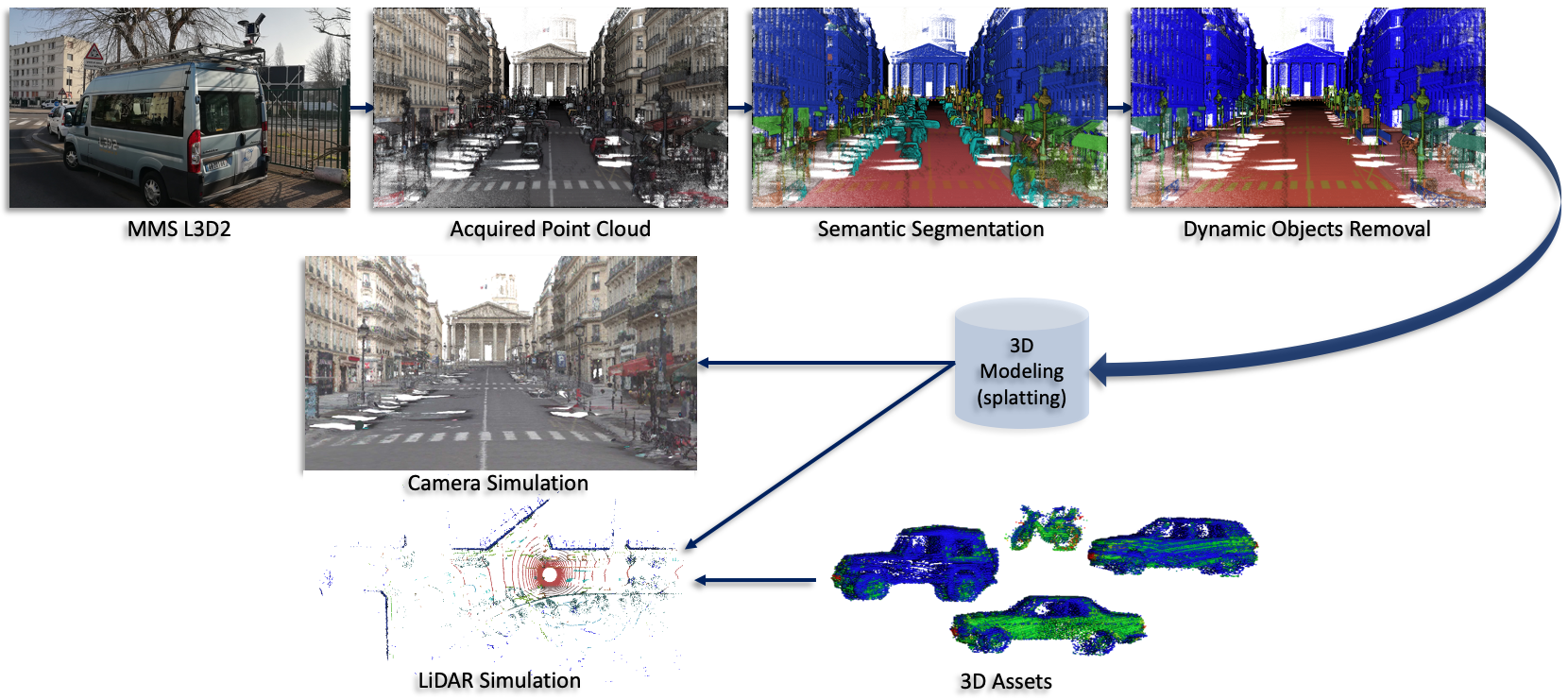
LiDAR sensors provide rich 3D information about their surrounding{s} and are becoming increasingly important for autonomous vehicles tasks such as {localization}, semantic segmentation, object detection, and tracking. {Simulation} accelerates the testing, validation, and deployment of autonomous vehicles while {also} reducing cost and eliminating the risks of testing in real-world scenarios. We address the problem of high-fidelity LiDAR simulation and present a pipeline that leverages real-world point clouds acquired by mobile mapping systems. Point-based geometry representations, more specifically splats {(2D oriented disks with normals)}, have proven their ability to accurately model the underlying surface in large point clouds{, mainly with uniform density}. We introduce an adaptive splat generation method that accurately models the underlying 3D geometry {to handle real-world point clouds with variable densities}, especially for thin structures. Moreover, we introduce a {fast} LiDAR {sensor} simulator, {working} in the splatted model, {that leverages} the GPU parallel architecture with an acceleration structure while focusing on efficiently handling large point clouds. We test our LiDAR simulation in real-world conditions, showing qualitative and quantitative results compared to basic splatting and meshing techniques, demonstrating the interest of our modeling technique.
翻译:LiDAR 传感器提供有关其周围{s} 的丰富的三维信息,并且越来越对自动车辆任务,如{本地化} 、 语义分割、 物体探测和跟踪等,变得日益重要。 { 模拟} 加速自动车辆的测试、 验证和部署, 同时降低成本和消除在现实世界情景下测试的风险。 我们处理高不洁的LIDAR模拟问题, 并提供一个管道, 利用移动绘图系统获取的真实世界点云。 基于点的几何表示, 更具体地说, splats { (2D) 正常的磁盘 } 已经证明它们有能力在大点云中准确模拟基础表面 {, 主要是以统一的密度 } 。 我们引入了适应性花样生成方法, 精确地模拟 3D 底的3D 光点云 。 { } 特别是对于薄度结构, 我们引入了 {dAR {sensorgorg} 模拟, 和 工作} 样板状模型中 { { splattlats} 。