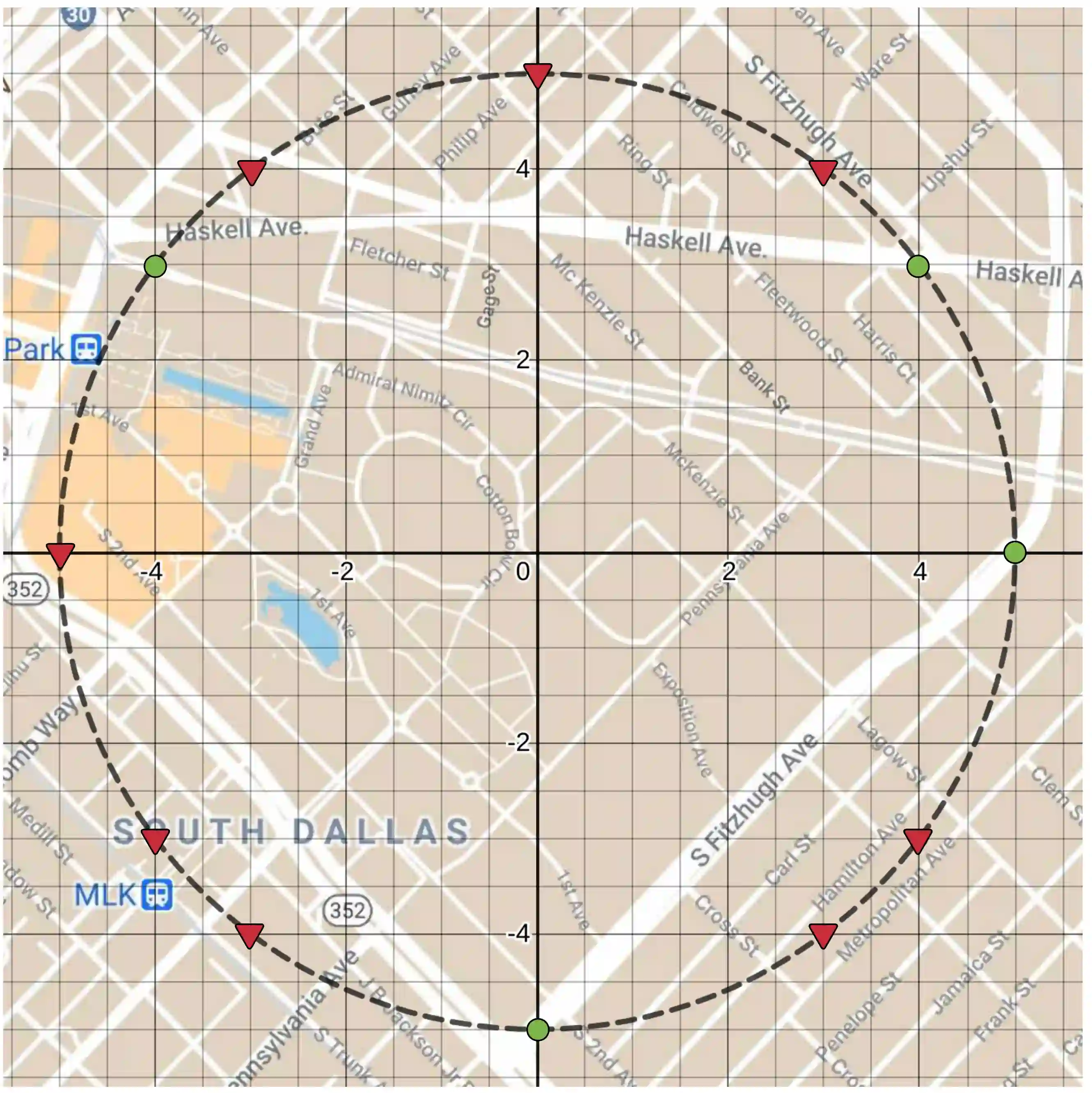
Ride Hailing Services (RHS) have become a popular means of transportation, and with its popularity comes the concerns of privacy of riders and drivers. ORide is a privacy-preserving RHS proposed at the USENIX Security Symposium 2017 and uses Somewhat Homomorphic Encryption (SHE). In their protocol, a rider and all drivers in a zone send their encrypted coordinates to the RHS Service Provider (SP) who computes the squared Euclidean distances between them and forwards them to the rider. The rider decrypts these and selects the optimal driver with least Euclidean distance. In this work, we demonstrate a location-harvesting attack where an honest-but-curious rider, making only a single ride request, can determine the exact coordinates of about half the number of responding drivers even when only the distance between the rider and drivers are given. The significance of our attack lies in inferring locations of other drivers in the zone, which are not (supposed to be) revealed to the rider as per the protocol. We validate our attack by running experiments on zones of varying sizes in arbitrarily selected big cities. Our attack is based on enumerating lattice points on a circle of sufficiently small radius and eliminating solutions based on conditions imposed by the application scenario. Finally, we propose a modification to ORide aimed at thwarting our attack and show that this modification provides sufficient driver anonymity while preserving ride matching accuracy.
翻译:骑手和所有驾驶员在其协议中将他们的加密坐标发送给RHS服务提供商(SP),后者计算了它们之间的平方欧立地距离,并将它们转发给驾驶员。驾驶员解密了这些地方,并选择了最合适的驾驶员和驾驶员的距离。在这项工作中,我们展示了一次地点收获式攻击,在那里,一个诚实但但多而多而多而多知多知的骑手(SHE)只能提出单次搭车请求,可以确定大约一半的应答驾驶员的确切坐标。我们的攻击的意义在于将区域内其他驾驶员的偏方位推断出区内其他驾驶员的位置,而根据协议,这些位置(可以确定)没有被披露给驾驶员。在这项工作中,驾驶员解密地分解了这些位置,并选择了最不远的欧几里德路距离的最佳驾驶员。在进行这项工作中,我们展示了一种地点收获性攻击,我们通过对一个诚实但多但又多但又多但又多但又多得多的驾驶者进行实验,我们用一个基于任意性城市的固定地标标点来确认我们攻击。