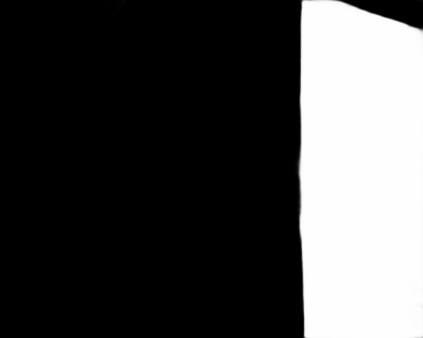
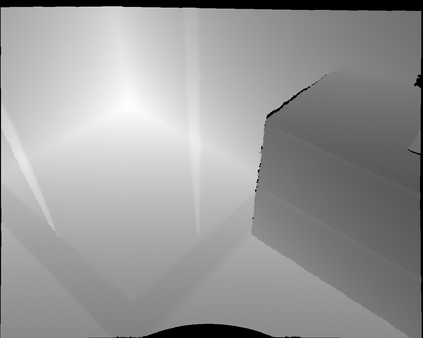
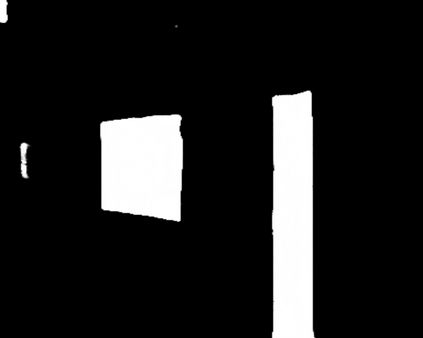
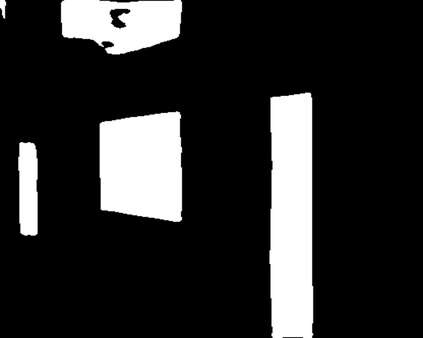
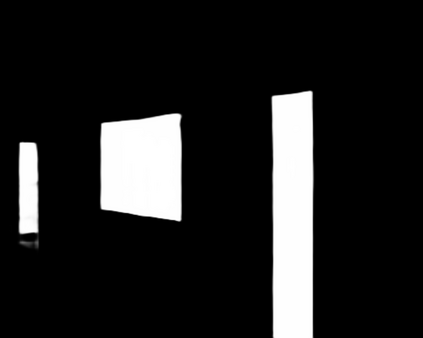
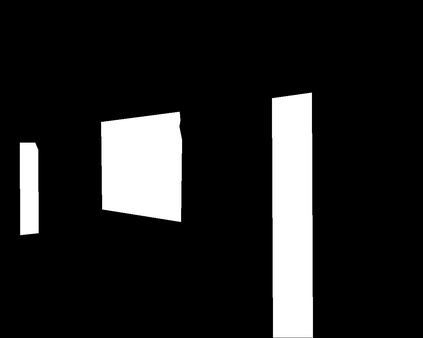
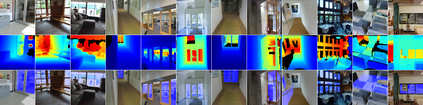
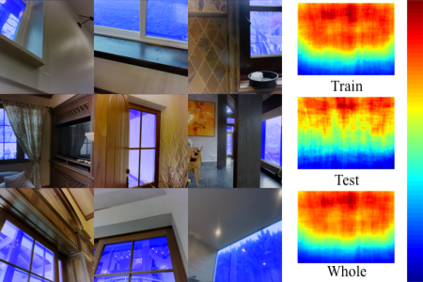
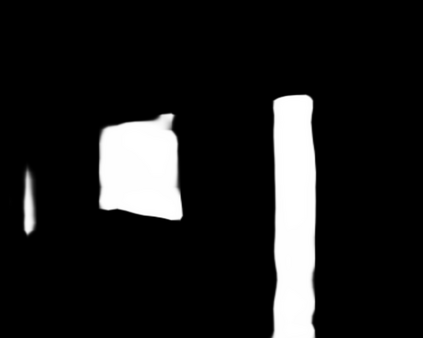
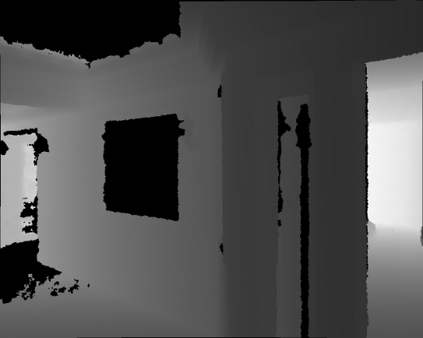
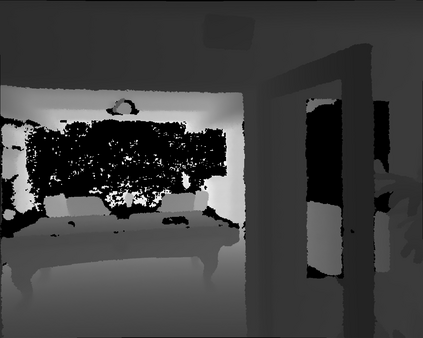
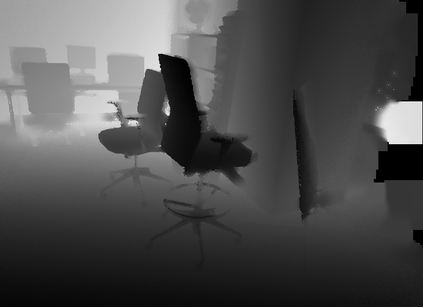
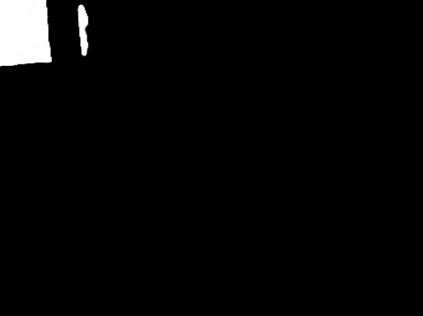
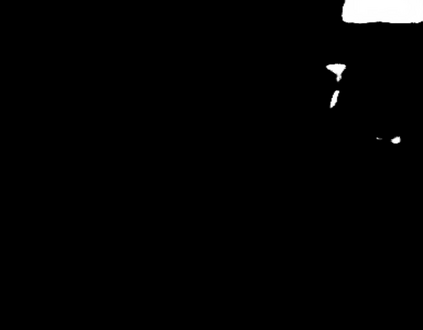
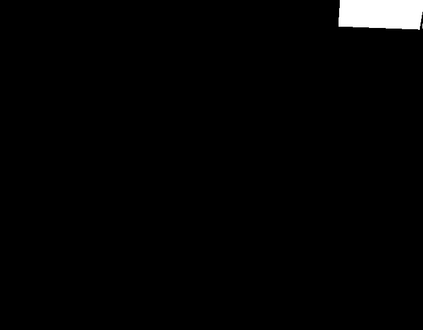
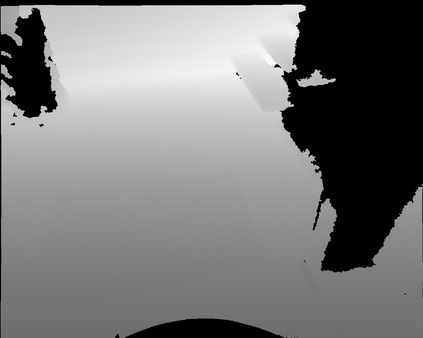
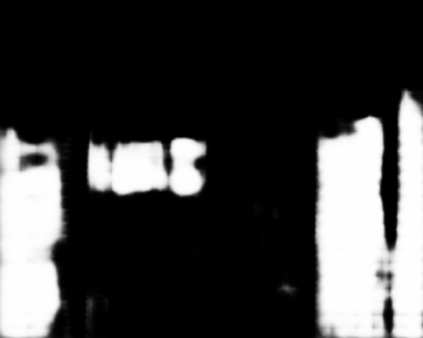
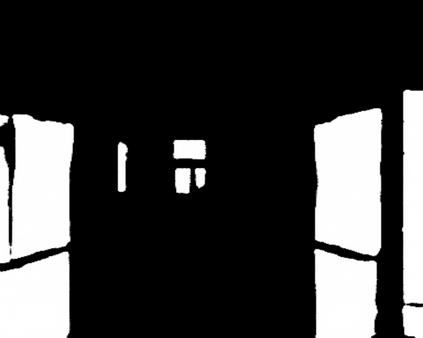
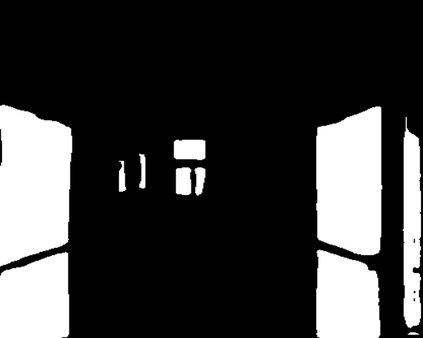
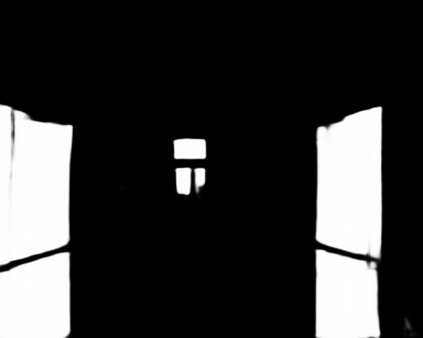
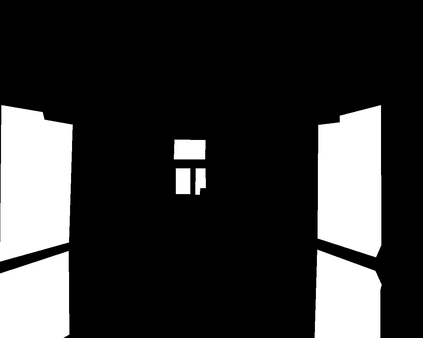
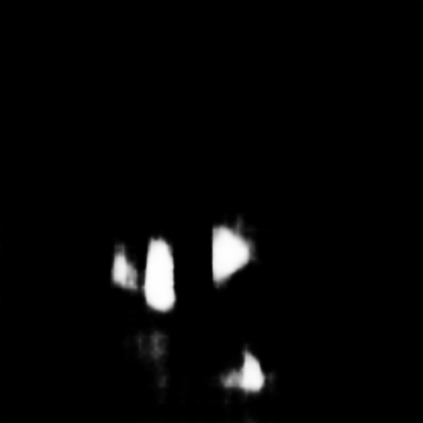
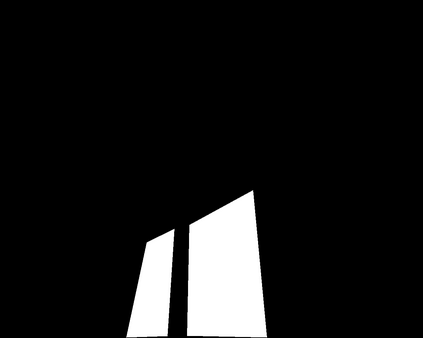
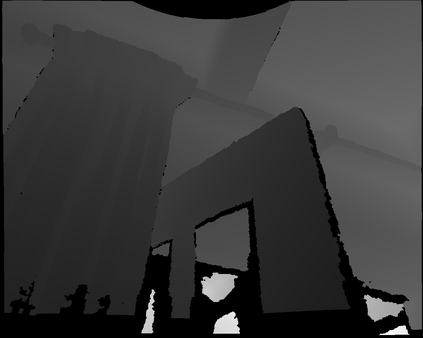
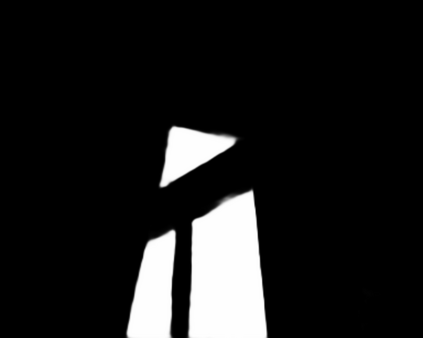
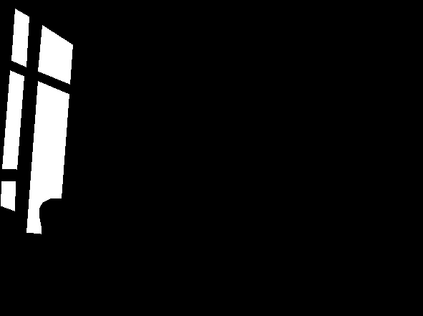
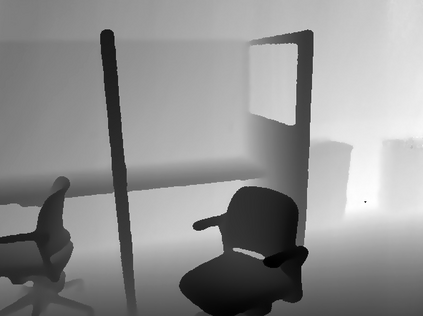
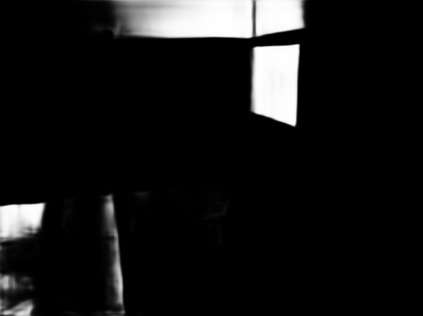
Glass surfaces are becoming increasingly ubiquitous as modern buildings tend to use a lot of glass panels. This however poses substantial challenges on the operations of autonomous systems such as robots, self-driving cars and drones, as the glass panels can become transparent obstacles to the navigation.Existing works attempt to exploit various cues, including glass boundary context or reflections, as a prior. However, they are all based on input RGB images.We observe that the transmission of 3D depth sensor light through glass surfaces often produces blank regions in the depth maps, which can offer additional insights to complement the RGB image features for glass surface detection. In this paper, we propose a novel framework for glass surface detection by incorporating RGB-D information, with two novel modules: (1) a cross-modal context mining (CCM) module to adaptively learn individual and mutual context features from RGB and depth information, and (2) a depth-missing aware attention (DAA) module to explicitly exploit spatial locations where missing depths occur to help detect the presence of glass surfaces. In addition, we propose a large-scale RGB-D glass surface detection dataset, called \textit{RGB-D GSD}, for RGB-D glass surface detection. Our dataset comprises 3,009 real-world RGB-D glass surface images with precise annotations. Extensive experimental results show that our proposed model outperforms state-of-the-art methods.
翻译:由于现代建筑往往使用大量玻璃板,玻璃表面日益普遍,因此玻璃表面表面表面越来越普遍,但这对机器人、自驾驶汽车和无人驾驶飞机等自主系统的运作构成重大挑战,因为玻璃面板可以成为对导航的透明障碍。继续努力利用各种线索,包括玻璃边界背景或反射,作为以前的一种方式。然而,它们都以输入的 RGB 图像为基础。我们注意到,通过玻璃表面传送3D深度传感器光往往在深度地图中产生空白区域,这可以为玻璃表面探测提供补充RGB图像特征的更多见解。在本文件中,我们提议一个玻璃表面探测新框架,将RGB-D信息纳入其中,并有两个新的模块:(1) 跨模式背景采矿(CCM)模块,以适应方式学习RGB和深度信息中的个人和相互背景特征,(2) 深度感应注意模块(DAAA),以明确开发空间位置,从而发现玻璃表面表面表面的出现。此外,我们提议用大规模 RGB-D 玻璃表面表面表面探测结果显示大规模RGB-D 实际数据,称为我们的数据库-RG-RG-RV-S-S-T。