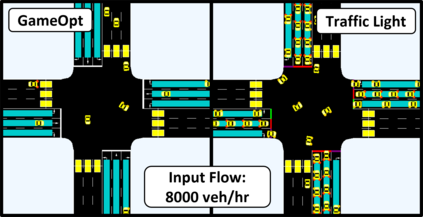
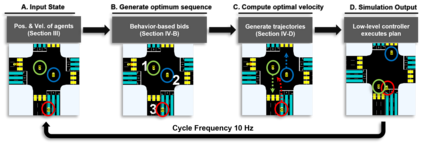
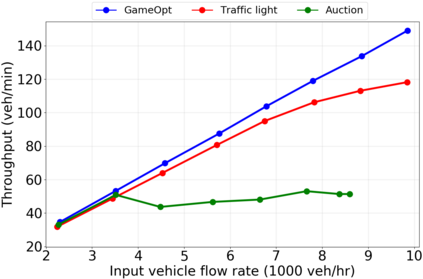
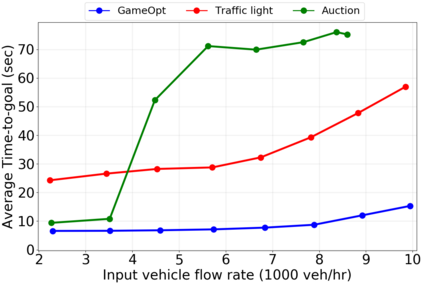
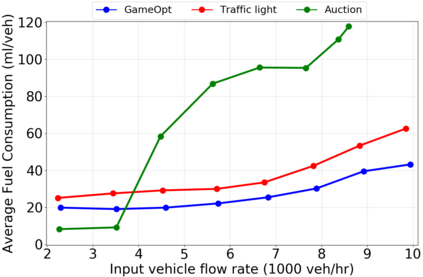
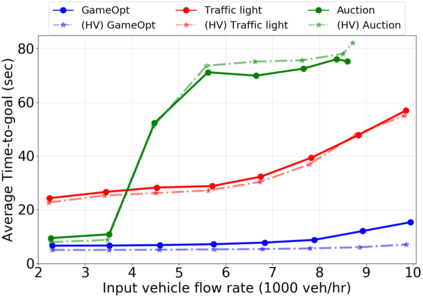
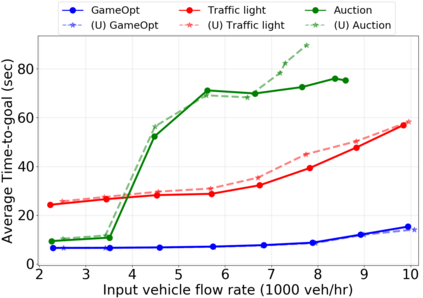
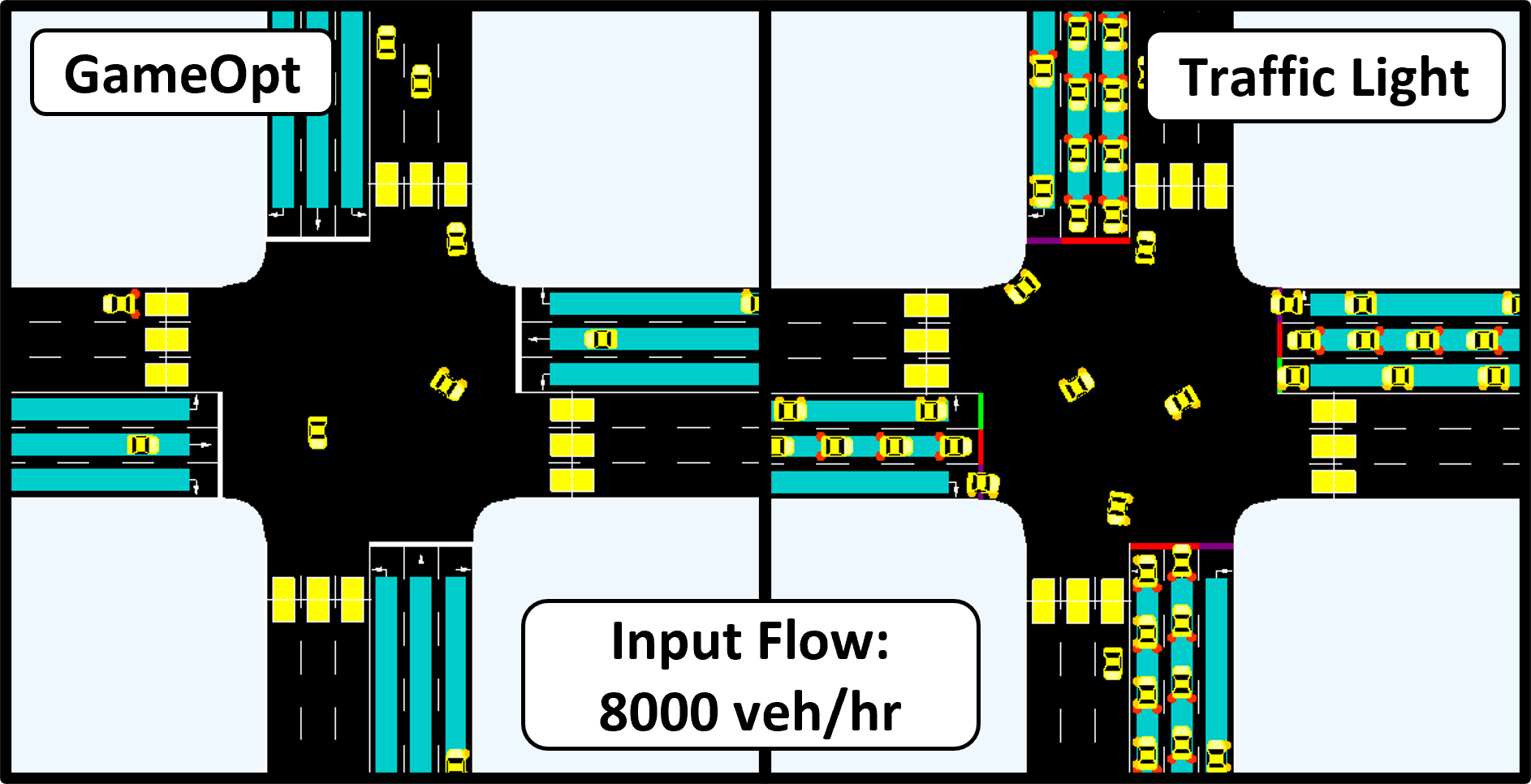
We propose GameOpt: a novel hybrid approach to cooperative intersection control for dynamic, multi-lane, unsignalized intersections. Safely navigating these complex and accident prone intersections requires simultaneous trajectory planning and negotiation among drivers. GameOpt is a hybrid formulation that first uses an auction mechanism to generate a priority entrance sequence for every agent, followed by an optimization-based trajectory planner that computes velocity controls that satisfy the priority sequence. This coupling operates at real-time speeds of less than $10$ milliseconds in high density traffic of more than $10,000$ vehicles/hr, $100\times$ faster than other fully optimization-based methods, while providing guarantees in terms of fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least $25\%$, time taken to reach the goal by $75\%$, and fuel consumption by $33\%$ compared to auction-based approaches and signaled approaches using traffic-lights and stop signs.
翻译:我们建议 GameOpt : 一种新型的混合方法,用于对动态、多路、无标志的十字路口进行合作交叉控制。 安全地通航这些复杂和易发生事故的十字路口需要同时进行轨迹规划和司机之间的谈判。 GameOpt 是一种混合的配方,首先使用拍卖机制为每个代理商创造优先入口序列,然后用优化的轨迹规划器计算速度控制,以达到优先序列。 这种结合的实时速度小于10美元毫秒,高密度交通量超过10 000美元/小时,比其他完全优化方法快100美元,同时在公平、安全和效率方面提供保障。 在SUMOimulator上测试,我们的算法将吞吐量至少25美元,达到目标的时间为75美元,燃料消耗量为33美元,而拍卖方法和使用交通灯和停车标志的信号方法则低于10 000美元。