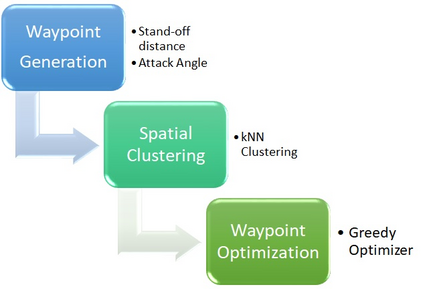
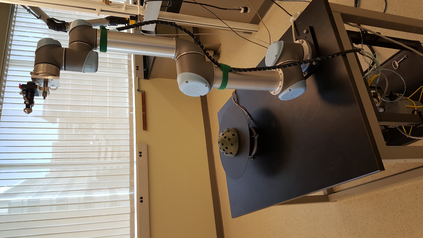
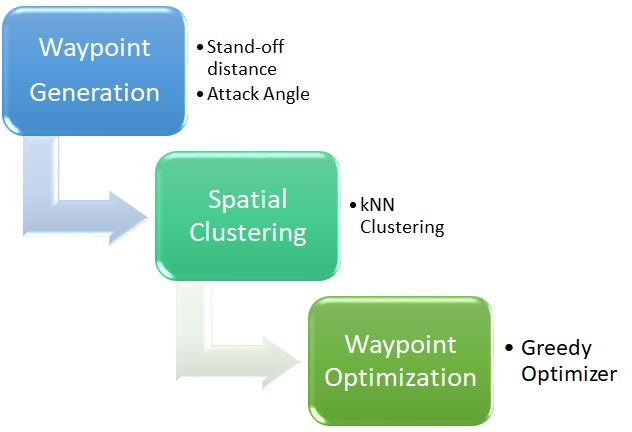
The problem of optimizing a sequence of tasks for a robot, also known as multi-point manufacturing, is a well-studied problem. Many of these solutions use a variant of the Traveling Salesman Problem (TSP) and seek to find the minimum distance or time solution. Optimal solution methods struggle to run in real-time and scale for larger problems. In online planning applications where the tasks being executed are fast, the computational time to optimize the ordering can dominate the total execution time. The optimal solution in this application is defined as the computational time for planning plus the execution time. Therefore, the algorithm presented here balances the quality of the solution with the total execution time by finding a locally optimal sequence. The algorithm is comprised of waypoint generation, spatial clustering, and waypoint optimization. Significant improvements in time reduction were seen and validated against a base case algorithm in simulation and on a real UR5 robot.
翻译:优化机器人(又称多点制造)任务序列的问题是一个研究周全的问题。许多这些解决方案使用旅行销售商问题(TSP)的变式,并试图找到最低距离或时间解决方案。 最佳的解决方案方法在实时运行和规模上难以应对更大的问题。 在任务执行得很快的在线规划应用程序中,优化订单的计算时间可以支配总执行时间。 本应用程序中的最佳解决方案被定义为规划的计算时间加执行时间。 因此,这里提出的算法通过找到一个本地最佳的序列来平衡解决方案的质量与总执行时间。 算法包括途径点生成、空间组合和路径点优化。 在模拟和真实的UR5机器人中,发现并验证了时间的大幅缩短。