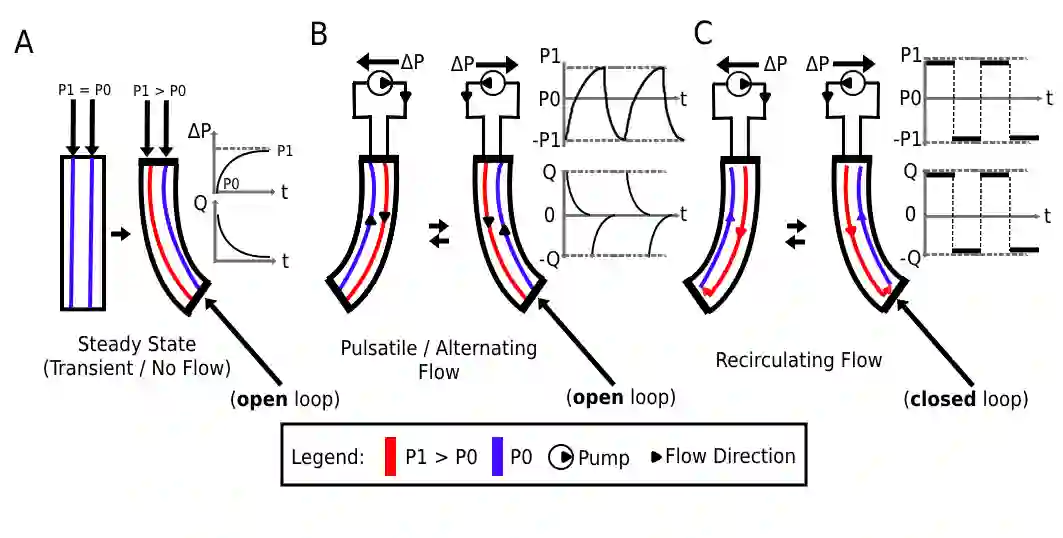
The one-to-one mapping of control inputs to actuator outputs results in elaborate routing architectures that limit how complex fluidic soft robot behaviours can currently become. Embodied intelligence can be used as a tool to counteract this phenomenon. Control functionality can be embedded directly into actuators by leveraging the characteristics of fluid flow phenomena. Whilst prior soft robotics work has focused exclusively on actuators operating in a state of transient/no flow (constant pressure), or pulsatile/alternating flow, our work begins to explore the possibilities granted by operating in the closed-loop flow recirculation regime. Here we introduce the concept of FlowBots: soft robots that utilise the characteristics of continuous fluid flow to enable the embodiment of complex control functionality directly into the structure of the robot. FlowBots have robust, integrated, no-moving-part control systems, and these architectures enable: monolithic additive manufacturing methods, rapid prototyping, greater sustainability, and an expansive range of applications. Based on three FlowBot examples: a bidirectional actuator, a gripper, and a quadruped swimmer - we demonstrate how the characteristics of flow recirculation contribute to simplifications in fluidic analogue control architectures. We conclude by outlining our design and rapid prototyping methodology to empower others in the field to explore this new, emerging design field, and design their own FlowBots.
翻译:暂无翻译