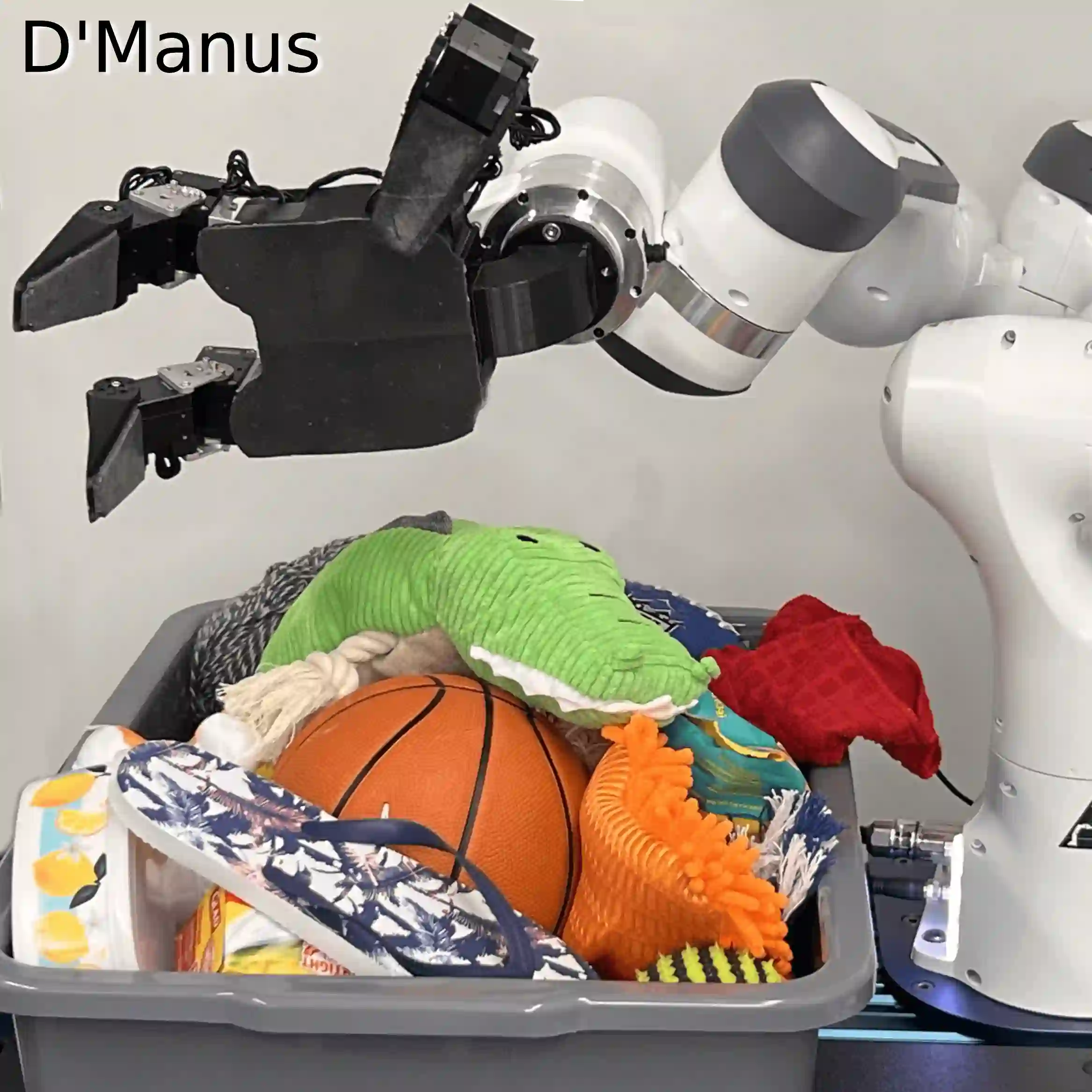
High cost and lack of reliability has precluded the widespread adoption of dexterous hands in robotics. Furthermore, the lack of a viable tactile sensor capable of sensing over the entire area of the hand impedes the rich, low-level feedback that would improve learning of dexterous manipulation skills. This paper introduces an inexpensive, modular, robust, and scalable platform - the DManus- aimed at resolving these challenges while satisfying the large-scale data collection capabilities demanded by deep robot learning paradigms. Studies on human manipulation point to the criticality of low-level tactile feedback in performing everyday dexterous tasks. The DManus comes with ReSkin sensing on the entire surface of the palm as well as the fingertips. We demonstrate effectiveness of the fully integrated system in a tactile aware task - bin picking and sorting. Code, documentation, design files, detailed assembly instructions, trained models, task videos, and all supplementary materials required to recreate the setup can be found on http://roboticsbenchmarks.org/platforms/dmanus
翻译:高成本和缺乏可靠性使得机器人无法广泛采用极具弹性的手。此外,缺乏一个能够感知整个手部的可行触动感应器阻碍了丰富、低层次的反馈,从而无法改进对极具弹性操纵技能的学习。本文介绍了一个廉价、模块、稳健和可扩缩的平台――Dmanus(Dmanus),目的是在满足深层机器人学习模式所要求的大规模数据收集能力的同时应对这些挑战。关于人类操纵的研究指出,低水平触动感应反馈对于执行日常极具弹性的任务至关重要。Dmanus在掌上整个表面和指尖上都带有ReSkin感。我们展示了完全整合的系统在触觉任务中的有效性――垃圾选取和分类。代码、文件、设计文件、详细组装说明、经过培训的模型、任务视频以及重新建立设置所需的所有补充材料,可查阅http://robotictbenchnchnockmarks.org/platforms/dus/dus。