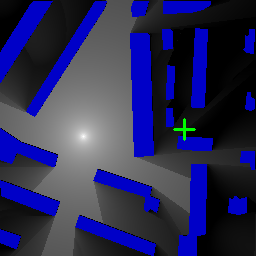
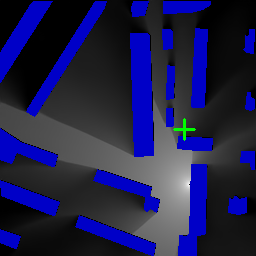
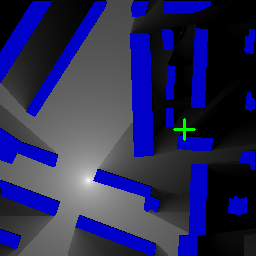
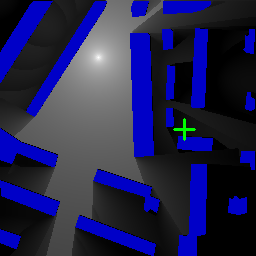
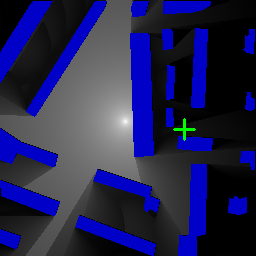
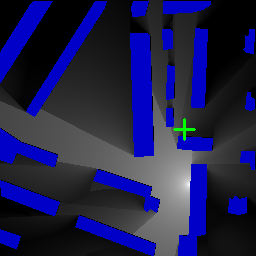
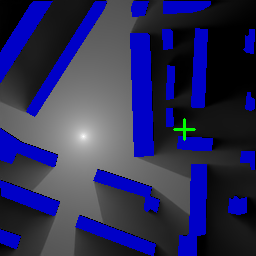
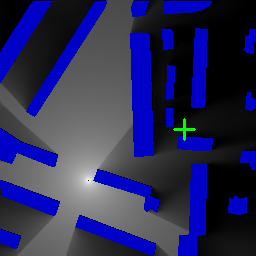
This paper deals with the problem of localization in a cellular network in a dense urban scenario. Global Navigation Satellite Systems typically perform poorly in urban environments, where the likelihood of line-of-sight conditions between the devices and the satellites is low, and thus alternative localization methods are required for good accuracy. We present a deep learning method for localization, based merely on pathloss, which does not require any increase in computation complexity at the user devices with respect to the device standard operations, unlike methods that rely on time of arrival or angle of arrival information. In a wireless network, user devices scan the base station beacon slots and identify the few strongest base station signals for handover and user-base station association purposes. In the proposed method, the user to be localized simply reports such received signal strengths to a central processing unit, which may be located in the cloud. For each base station we have good approximation of the pathloss at every location in a dense grid in the map. This approximation is provided by RadioUNet, a deep learning-based simulator of pathloss functions in urban environment, that we have previously proposed and published. Using the estimated pathloss radio maps of all base stations and the corresponding reported signal strengths, the proposed deep learning algorithm can extract a very accurate localization of the user. The proposed method, called LocUNet, enjoys high robustness to inaccuracies in the estimated radio maps. We demonstrate this by numerical experiments, which obtain state-of-the-art results.
翻译:本文涉及在密集的城市情景下在蜂窝网络中定位的问题。在城市环境中,全球导航卫星系统通常表现不佳,城市环境中设备与卫星之间视线条件的可能性较低,因此需要其他的本地化方法,以便准确性很高。我们只是根据病理损失提出一种深入的本地化学习方法,它并不要求用户装置在设备标准操作方面计算复杂程度的任何提高,这与依赖到达时间或抵达角度信息的方法不同。在一个无线网络中,用户装置扫描基地站信标位置,并查明少数最强的基础站信号,用于交接和用户基地站联系。在拟议方法中,将本地化的用户仅向中央处理单位报告这种接收到的信号强度,而中央处理单位可能位于云中。对于每个基地站,我们完全可以近似每个地点在地图密度较稠密的电网中计算失灵的精度。RadioUNet是一个基于深学习的模拟城市环境中的路径失灵功能的模拟器,我们以前提议和出版的。使用所有基地台站的估算路径图的准确性无线电定位图,我们报告了高压的信号。