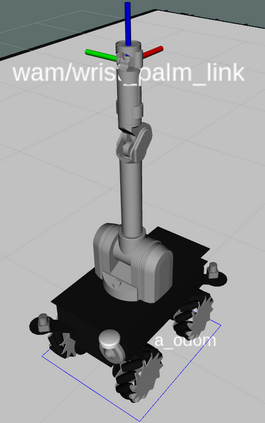
Motion control of mobile manipulators (a robotic arm mounted on a mobile base) can be challenging for complex tasks such as material and package handling. In this paper, a task-space stabilization controller based on Nonlinear Model Predictive Control (NMPC) is designed and implemented to a 10 Degrees of Freedom (DOF) mobile manipulator which consists of a 7-DOF robotic arm and a 3-DOF mobile base. The system model is based on kinematic models where the end-effector orientation is parameterized directly by a rotation matrix. The state and control constraints as well as singularity constraints are explicitly included in the NMPC formulation. The controller is tested using real-time simulations, which demonstrate high positioning accuracy with tractable computational cost.
翻译:移动操纵器(在移动基地上架设的机器人臂)的机动操纵器控制对于材料和包装处理等复杂任务可能具有挑战性,在本文件中,基于非线性模型预测控制(NMPC)的任务空间稳定控制器的设计和实施为自由10度移动操纵器(DOF),该控制器由7-DOF机器人臂和3-DOF移动基地组成,系统模型以运动模型为基础,最终效应定向由旋转矩阵直接参数化。状态和控制限制以及单一性限制明确列入NMPC的配方。控制器通过实时模拟进行测试,显示高定位精度和可移动计算成本。