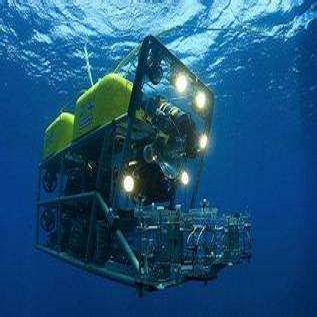
The current approach to exploring and monitoring complex underwater ecosystems, such as coral reefs, is to conduct surveys using diver-held or static cameras, or deploying sensor buoys. These approaches often fail to capture the full variation and complexity of interactions between different reef organisms and their habitat. The CUREE platform presented in this paper provides a unique set of capabilities in the form of robot behaviors and perception algorithms to enable scientists to explore different aspects of an ecosystem. Examples of these capabilities include low-altitude visual surveys, soundscape surveys, habitat characterization, and animal following. We demonstrate these capabilities by describing two field deployments on coral reefs in the US Virgin Islands. In the first deployment, we show that CUREE can identify the preferred habitat type of snapping shrimp in a reef through a combination of a visual survey, habitat characterization, and a soundscape survey. In the second deployment, we demonstrate CUREE's ability to follow arbitrary animals by separately following a barracuda and stingray for several minutes each in midwater and benthic environments, respectively.
翻译:当前探索和监测复杂的水下生态系统(如珊瑚礁)的方法是使用潜水员手持或静态相机进行调查,或部署传感器浮标。这些方法往往无法捕捉不同珊瑚礁生物和它们的栖息地之间相互作用的全部变化和复杂性。本文介绍的CUREE平台提供了一组独特的能力,通过机器人行为和感知算法来使科学家能够探索生态系统的不同方面。这些能力的示例包括低空视觉调查、声景调查、栖息地表征和动物后续。我们通过描述美国维京群岛珊瑚礁上的两次实地部署来证明这些能力。在第一次部署中,我们展示了CUREE通过视觉调查、栖息地表征和声景调查的结合,可以识别珊瑚礁中蝲蛄偏爱的栖息地类型。在第二次部署中,我们展示了CUREE跟随任意动物的能力,分别在中水和底栖环境下分别跟随大型梭子鱼和魔鬼鱼数分钟。