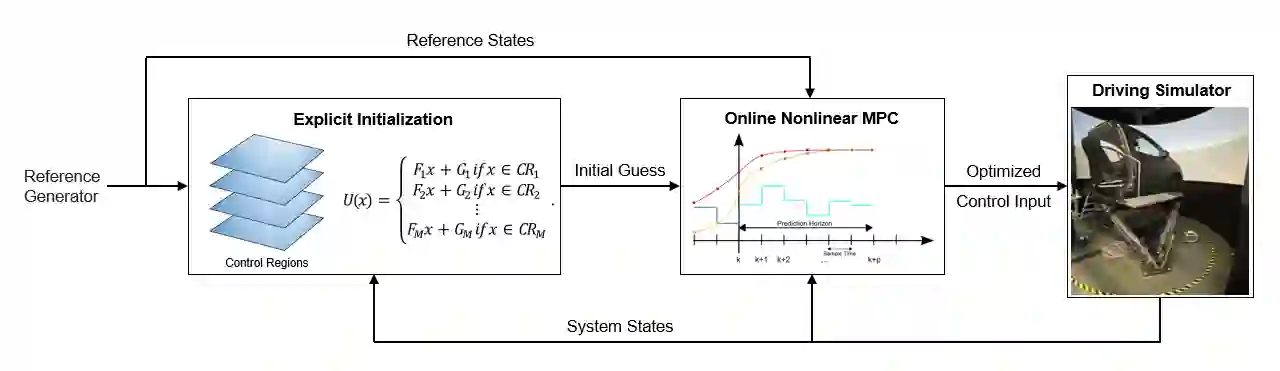
Driving simulators have been used in the automotive industry for many years because of their ability to perform tests in a safe, reproducible and controlled immersive virtual environment. The improved performance of the simulator and its ability to recreate in-vehicle experience for the user is established through motion cueing algorithms (MCA). Such algorithms have constantly been developed with model predictive control (MPC) acting as the main control technique. Currently, available MPC-based methods either compute the optimal controller online or derive an explicit control law offline. These approaches limit the applicability of the MCA for real-time applications due to online computational costs and/or offline memory storage issues. This research presents a solution to deal with issues of offline and online solving through a hybrid approach. For this, an explicit MPC is used to generate a look-up table to provide an initial guess as a warm-start for the implicit MPC-based MCA. From the simulations, it is observed that the presented hybrid approach is able to reduce online computation load by shifting it offline using the explicit controller. Further, the algorithm demonstrates a good tracking performance with a significant reduction of computation time in a complex driving scenario using an emulator environment of a driving simulator.
翻译:多年来,由于其在安全、可重复和可控现实虚拟环境中进行测试的能力,驾驶模拟器在汽车工业中被广泛应用。模型预测控制是主要控制技术,通过运动线索算法来提高模拟器的性能和重现用户的车内体验。目前,可用的基于模型预测控制的方法要么在线计算最优控制器,要么离线推导显式控制器。这些方法限制了基于模型预测控制的运动线索算法在实时应用中的适用性,因为在线计算成本和/或离线存储空间问题。本研究提供了一种解决方法,通过混合方法来解决离线和在线解决问题。为此,采用显式模型预测控制生成查找表,作为隐式基于模型预测控制线索算法的初始猜测。从仿真结果来看,所提出的混合方法能够通过使用显式控制器将在线计算负荷转移到离线状态,从而减少了在线计算时间,并在驾驶模拟器仿真环境中的复杂驾驶场景中展示了良好的跟踪性能。