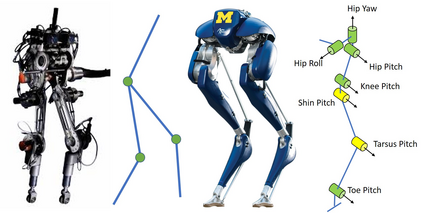
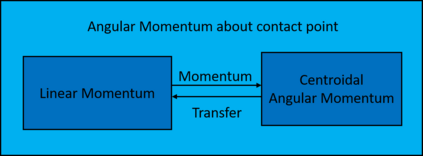
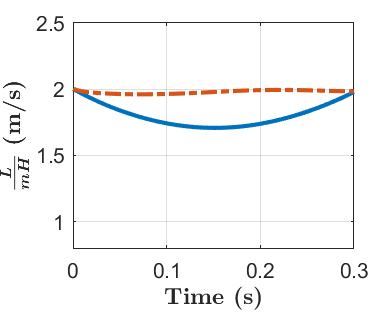
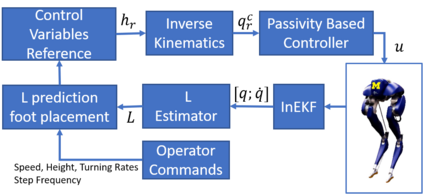
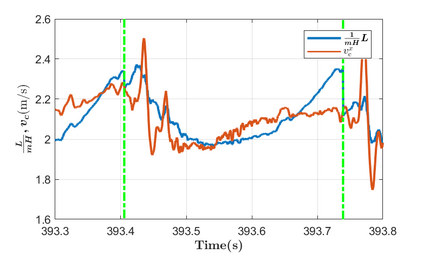
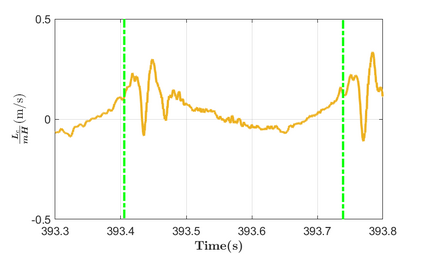
Low-dimensional models are ubiquitous in the bipedal robotics literature. On the one hand is the community of researchers that bases feedback control design on pendulum models selected to capture the center of mass dynamics of the robot during walking. On the other hand is the community that bases feedback control design on virtual constraints, which induce an exact low-dimensional model in the closed-loop system. In the first case, the low-dimensional model is valued for its physical insight and analytical tractability. In the second case, the low-dimensional model is integral to a rigorous analysis of the stability of walking gaits in the full-dimensional model of the robot. This paper seeks to clarify the commonalities and differences in the two perspectives for using low-dimensional models. In the process of doing so, we argue that angular momentum about the contact point is a better indicator of robot state than linear velocity. Concretely, we show that an approximate (pendulum and zero dynamics) model parameterized by angular momentum provides better predictions for foot placement on a physical robot (e.g., legs with mass) than does a related approximate model parameterized in terms of linear velocity. We implement an associated angular-momentum-based controller on Cassie, a 3D robot, and demonstrate high agility and robustness in experiments.
翻译:低维模型在双层机器人文献中是无处不在的。 一方面, 研究人员群群将反馈控制设计建立在为在步行过程中捕捉机器人质量动态中心而选择的钟式模型上。 另一方面, 群群将反馈控制设计建立在虚拟限制上, 这在闭环系统中诱发了一个精确的低维模型。 在第一种情况中, 低维模型因其物理洞察力和分析可感性而具有价值。 在第二种情况中, 低维模型是严谨分析机器人全维模型中行曲的稳定性所不可或缺的。 本文试图澄清使用低维模型两种观点的共性和差异。 在这样做的过程中, 我们提出, 有关接触点的角动力是机器人状态的更好指标, 而不是线性速度。 具体地说, 我们显示, 以角动力为参数的近( 基本和零动态) 模型, 提供了更好的预测, 相对于以直径模型为基准的机器人( e. g. leg. leg.) 的足部位定位, 而不是以直径、 高轴和高速度为基准的模型。 我们用直线性、 3 的模型进行一个相关的实验。