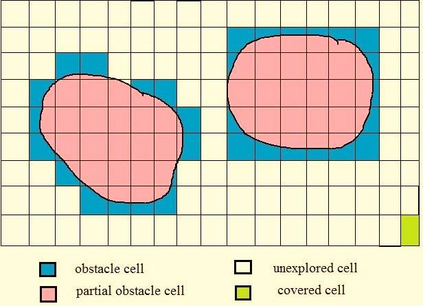
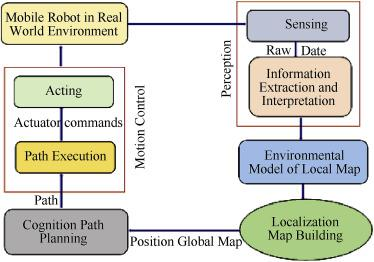
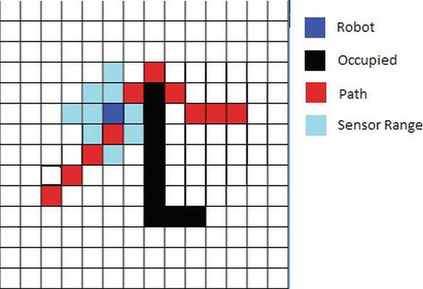
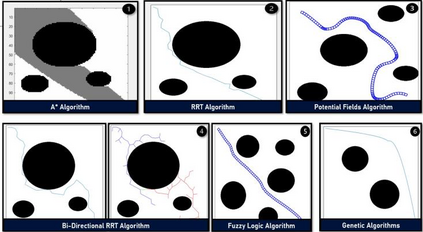
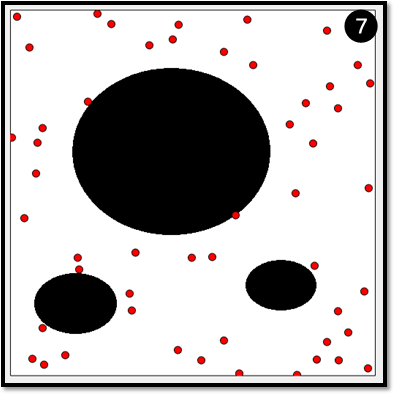
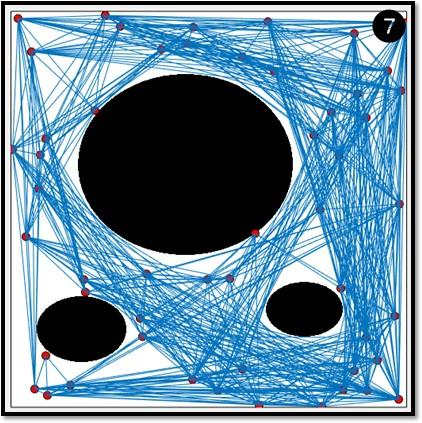
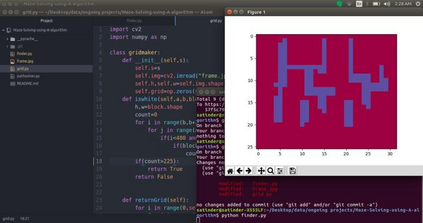
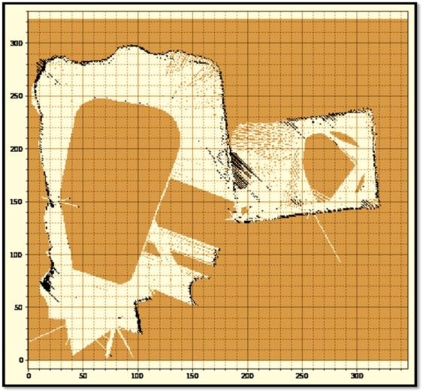
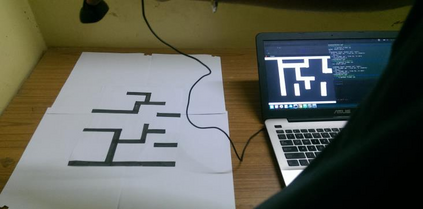
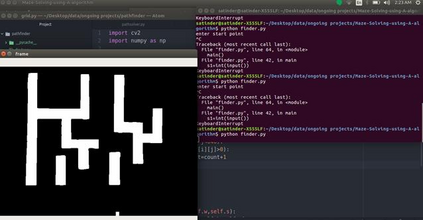
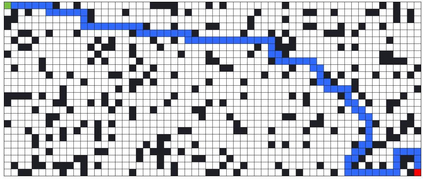
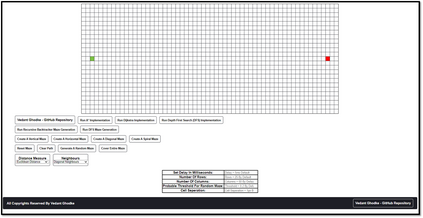
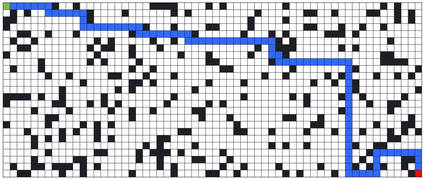
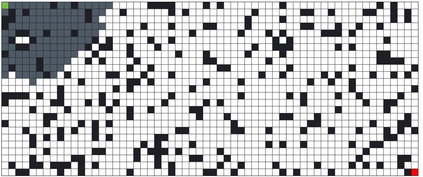
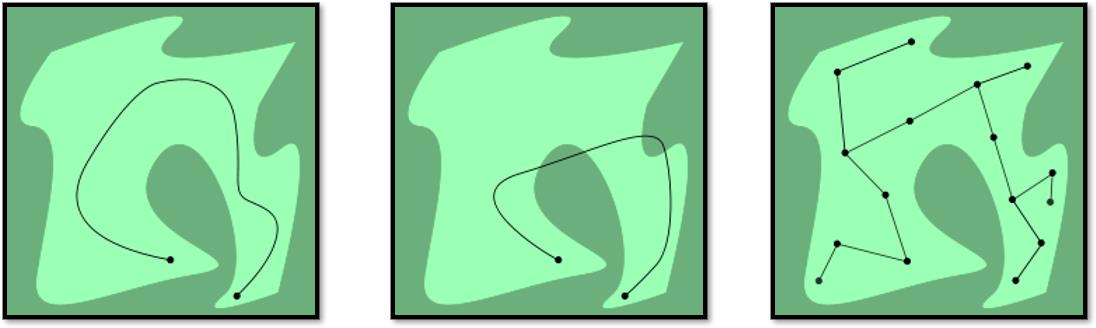
The shortage of workforce and increasing cost of maintenance has forced many farm industrialists to shift towards automated and mechanized approaches. The key component for autonomous systems is the path planning techniques used. Coverage path planning (CPP) algorithm is used for navigating over farmlands to perform various agricultural operations such as seeding, ploughing, or spraying pesticides and fertilizers. This report paper compares novel algorithms for autonomous navigation of farmlands. For reduction of navigational constraints, a high-resolution grid map representation is taken into consideration specific to Indian environments. The free space is covered by distinguishing the grid cells as covered, unexplored, partially explored and presence of an obstacle. The performance of the compared algorithms is evaluated with metrics such as time efficiency, space efficiency, accuracy, and robustness to changes in the environment. Robotic Operating System (ROS), Dassault Systemes Experience Platform (3DS Experience), MATLAB along Python were used for the simulation of the compared algorithms. The results proved the applicability of the algorithms for autonomous field navigation and feasibility with robotic path planning.
翻译:劳动力短缺和保养成本增加迫使许多农业工业家转向自动化和机械化方法,自主系统的关键组成部分是所使用的路径规划技术。覆盖路径规划(CPP)算法用于在农田上航行,以进行各种农业作业,如播种、犁耕或喷洒农药和化肥。本报告比较了农场自主导航的新算法。为减少航行限制,将印度环境特有的高分辨率网格图表示法考虑在内。自由空间通过区分覆盖、未探索、部分探索和存在障碍的网格细胞来覆盖。比较算法的性能通过时间效率、空间效率、准确性和对环境变化的稳健性等衡量尺度来评估。机器人操作系统(ROS)、达包系统经验平台(3DS经验)、与Python的MATLAB(MATLAB)被用于模拟比较算法。结果证明,自动场导航算法和机器人路径规划的可行性是可行的。