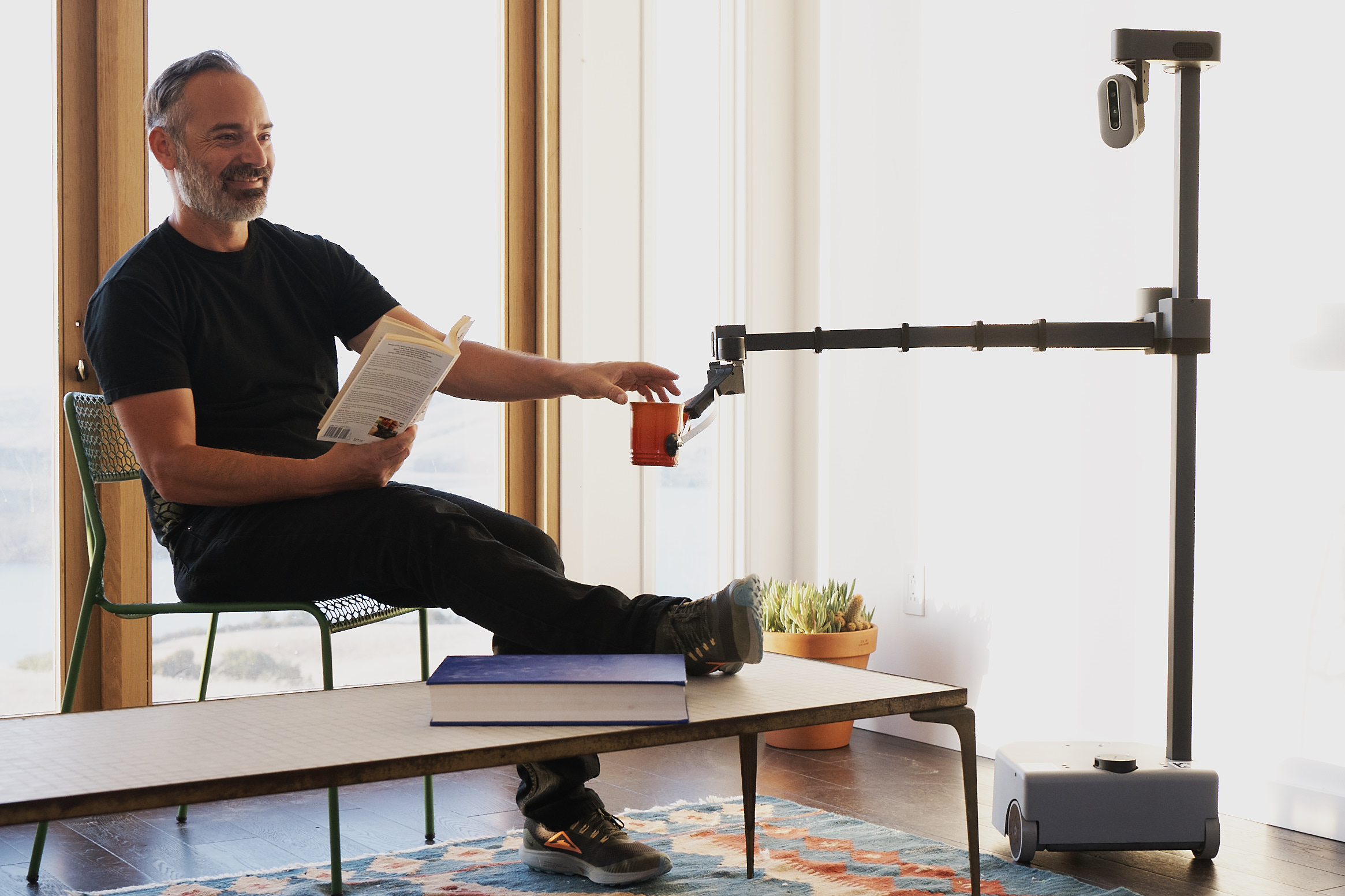
Mobile manipulators for indoor human environments can serve as versatile devices that perform a variety of tasks, yet adoption of this technology has been limited. Reducing size, weight, and cost could facilitate adoption, but risks restricting capabilities. We present a novel design that reduces size, weight, and cost, while still performing a variety of tasks. The core design consists of a two-wheeled differential-drive mobile base, a lift, and a telescoping arm configured to achieve Cartesian motion at the end of the arm. Design extensions include a 1 degree-of-freedom (DOF) wrist to stow a tool, a 2-DOF dexterous wrist to pitch and roll a tool, and a compliant gripper. We justify our design with mathematical models of static stability that relate the robot's size and weight to its workspace, payload, and applied forces. We also provide empirical support by teleoperating and autonomously controlling a commercial robot based on our design (the Stretch RE1 from Hello Robot Inc.) to perform tasks in real homes.
翻译:室内人类环境中的移动操纵器可以作为多用途装置,执行各种任务,但采用这种技术是有限的。降低尺寸、重量和成本可以促进采用,但有限制能力的风险。我们展示了一种新型设计,在减少尺寸、重量和成本的同时,仍然执行各种任务。核心设计包括两轮不同驾驶移动基,电梯和为在手臂末端实现笛卡尔运动而配置的遥测臂。设计扩展包括一个储存工具的自由手腕1度,一个投放和滚动工具的2-DOF模棱两可手腕,以及一个符合要求的牵引器。我们用固定稳定性的数学模型设计,将机器人的大小和重量与其工作空间、有效载荷和应用力联系起来。我们还提供经验支持,根据我们的设计(Hello Roble Inc.),通过远程操作和自主控制一个商业机器人,在现实家中执行任务。