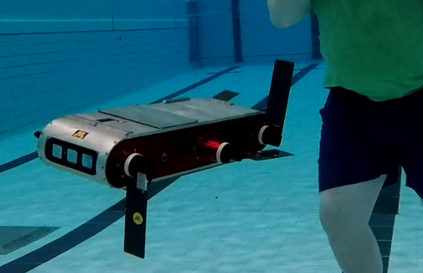
In this paper, we explore the use of motion for robot-to-human communication on three robotic platforms: the 5 degrees-of-freedom (DOF) Aqua autonomous underwater vehicle (AUV), a 3-DOF camera gimbal mounted on a Matrice 100 drone, and a 3-DOF Turtlebot2 terrestrial robot. While we previously explored the use of body language-like motion (called kinemes) versus other methods of communication for the Aqua AUV, we now extend those concepts to robots in two new and different domains. We evaluate all three platforms using a small interaction study where participants use gestures to communicate with the robot, receive information from the robot via kinemes, and then take actions based on the information. To compare the three domains we consider the accuracy of these interactions, the time it takes to complete them, and how confident users feel in the success of their interactions. The kineme systems perform with reasonable accuracy for all robots and experience gained in this study is used to form a set of prescriptions for further development of kineme systems.
翻译:在本文中,我们探索了在三个机器人平台上使用机器人与人类交流运动的运动:5度自由(DOF)Aqua自主水下飞行器(AUV),一台3度自由(DOF)相机Gimbal安装在Matrike 100无人驾驶飞机上,以及一台3度DOF Turtlebot2陆地机器人。我们以前曾探索过如何使用身体语言类运动(所谓的“Kiremes”)相对于Aqua AUV的其他通信方法,我们现在将这些概念扩展到两个新的和不同的领域。我们用一个小型互动研究来评估所有三个平台,参与者使用手势与机器人交流,通过Kiremes接收机器人的信息,然后根据信息采取行动。要比较我们考虑这些互动的准确性、完成这些互动所需的时间以及用户对其互动成功感知的自信。在这项研究中获得的所有机器人和经验中以合理的准确性运行的亲属系统被用来形成一套关于进一步发展亲属系统的处方。