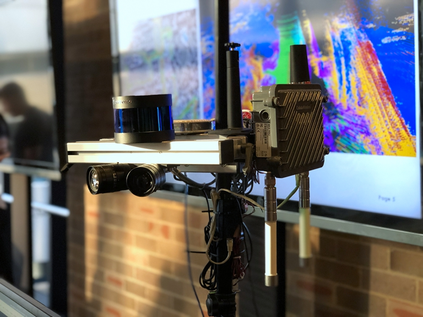
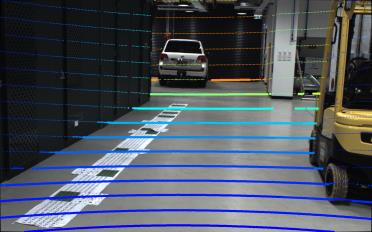
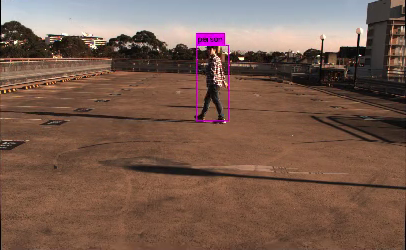
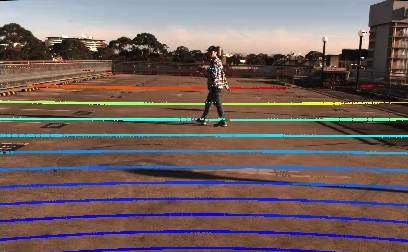
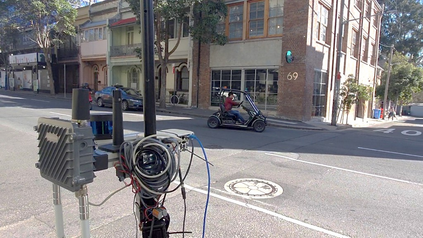
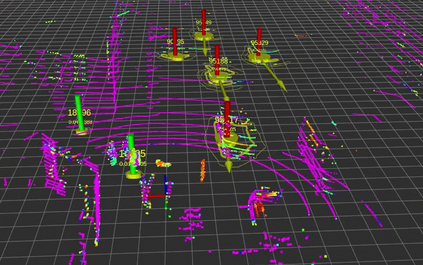
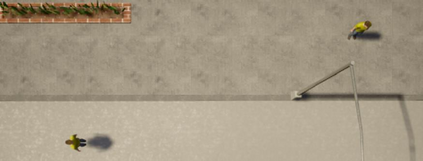
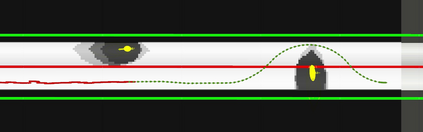
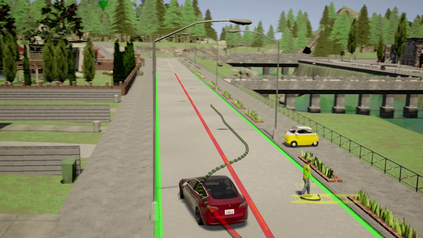
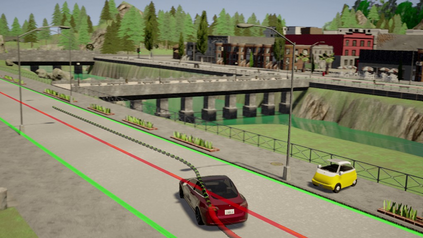
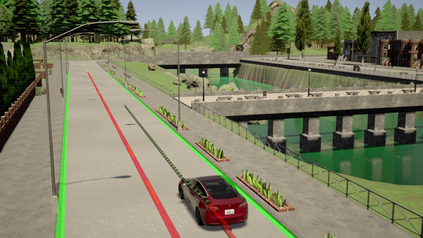
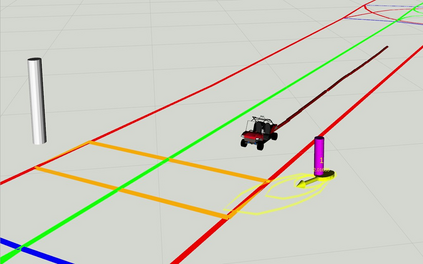
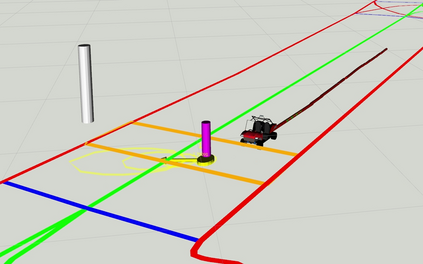
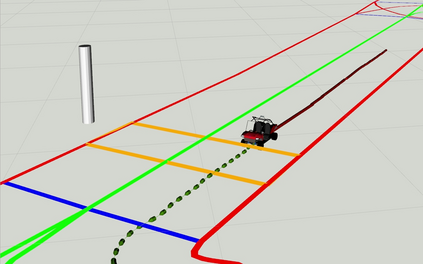
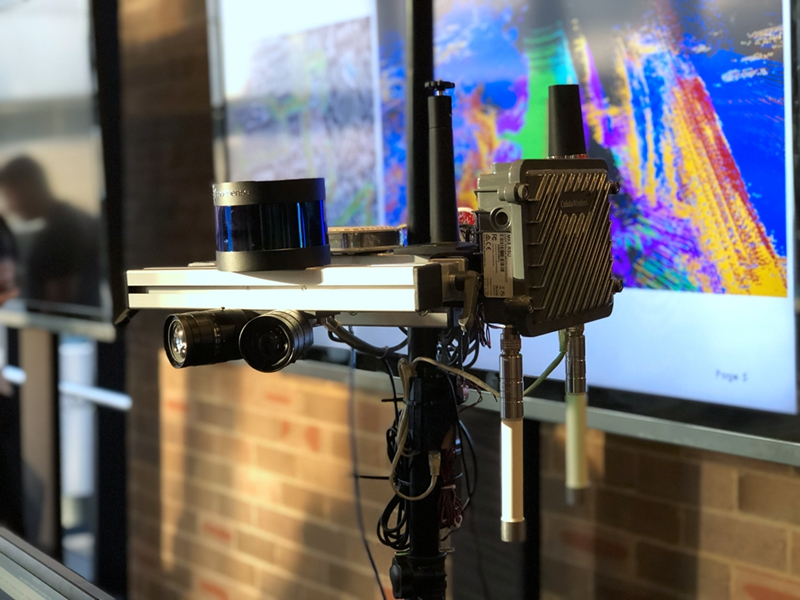
Cooperative perception, or collective perception (CP) is an emerging and promising technology for intelligent transportation systems (ITS). It enables an ITS station (ITS-S) to share its local perception information with others by means of vehicle-to-X (V2X) communication, thereby achieving improved efficiency and safety in road transportation. In this paper, we present our recent progress on the development of a connected and automated vehicle (CAV) and intelligent roadside unit (IRSU). We present three different experiments to demonstrate the use of CP service within intelligent infrastructure to improve awareness of vulnerable road users (VRU) and thus safety for CAVs in various traffic scenarios. We demonstrate in the experiments that a connected vehicle (CV) can "see" a pedestrian around the corners. More importantly, we demonstrate how CAVs can autonomously and safely interact with walking and running pedestrians, relying only on the CP information from the IRSU through vehicle-to-infrastructure (V2I) communication. This is one of the first demonstrations of urban vehicle automation using only CP information. We also address in the paper the handling of collective perception messages (CPMs) received from the IRSU, and passing them through a pipeline of CP information coordinate transformation with uncertainty, multiple road user tracking, and eventually path planning/decision making within the CAV. The experimental results were obtained with manually driven CV, fully autonomous CAV, and an IRSU retrofitted with vision and laser sensors and a road user tracking system.
翻译:合作观或集体观感(CP)是智能运输系统(ITS)的新兴和有希望的技术;它使ITS站(ITS-S)能够通过车辆到X(V2X)通信与他人分享其当地感知信息,从而提高公路运输的效率和安全;在本文件中,我们介绍了我们最近在开发连接和自动化车辆(CAV)和智能机动车路边装置(IRSU)方面取得的进展;我们介绍了三个不同的实验,以展示智能基础设施内使用CP服务的情况,以提高脆弱道路使用者(VRU)的认识,从而在各种交通情况中确保CAV的安全;我们在实验中表明,连接车辆(CV)能够“看到”一个在角落行人,从而与其他人分享其当地感知信息,我们展示了CAVS如何独立和安全地与行行行人进行互动,仅依靠ISU的车辆到基础设施(V2I)的通信,这是仅使用CP信息的首次展示城市车辆自动化。