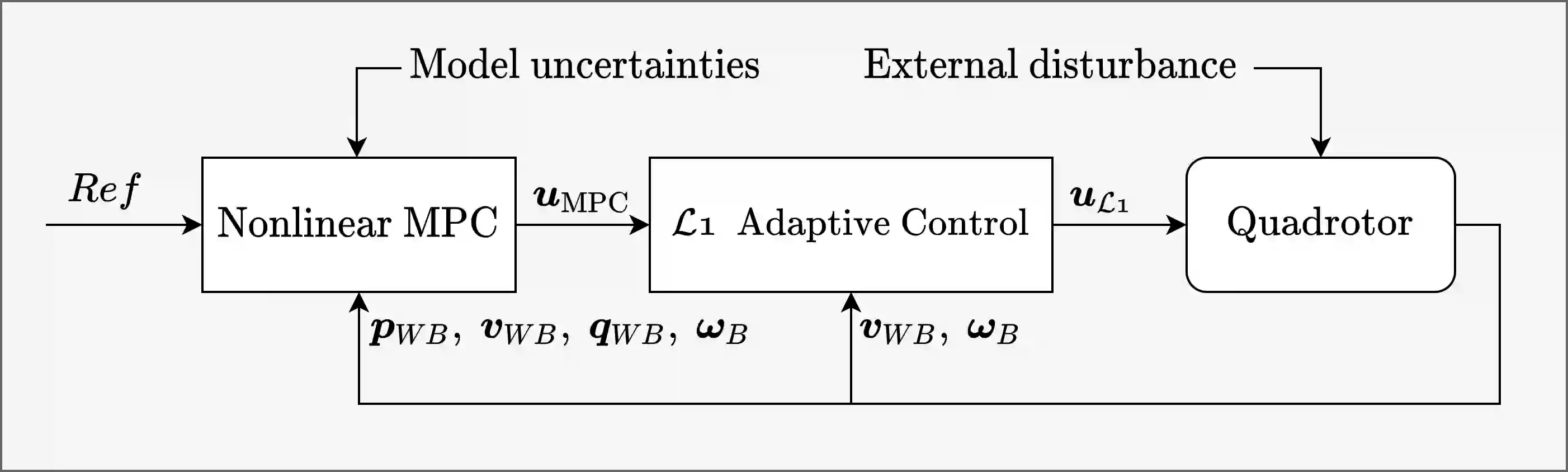
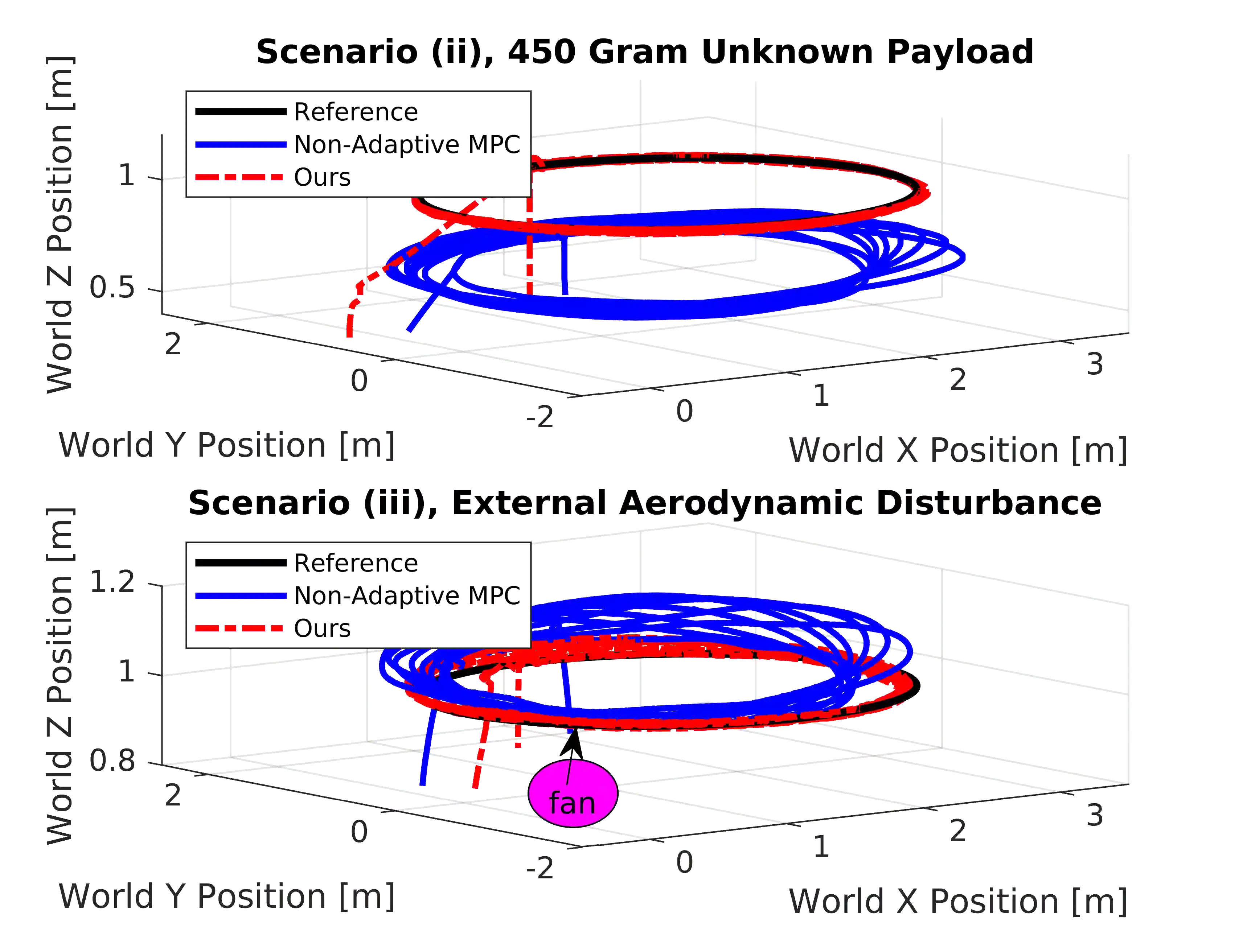
Agile quadrotor flight in challenging environments has the potential to revolutionize shipping, transportation, and search and rescue applications. Nonlinear model predictive control (NMPC) has recently shown promising results for agile quadrotor control, but relies on highly accurate models for maximum performance. Hence, model uncertainties in the form of unmodeled complex aerodynamic effects, varying payloads and parameter mismatch will degrade overall system performance. In this paper, we propose L1-NMPC, a novel hybrid adaptive NMPC to learn model uncertainties online and immediately compensate for them, drastically improving performance over the non-adaptive baseline with minimal computational overhead. Our proposed architecture generalizes to many different environments from which we evaluate wind, unknown payloads, and highly agile flight conditions. The proposed method demonstrates immense flexibility and robustness, with more than 90% tracking error reduction over non-adaptive NMPC under large unknown disturbances and without any gain tuning. In addition, the same controller with identical gains can accurately fly highly agile racing trajectories exhibiting top speeds of 70 km/h, offering tracking performance improvements of around 50% relative to the non-adaptive NMPC baseline. We will release our code fully open-sourced upon acceptance.
翻译:非线性模型预测控制(NMPC)最近展示了敏捷的孔晶体控制(NMPC)的有希望的结果,但以高度精确的性能模型为依据。因此,以未经模型的复杂空气动力效应、不同有效载荷和参数不匹配等形式出现的模型不确定性将降低整个系统性能。在本文件中,我们提议建立一个新型的适应性适应性适应性适应性新混合型NMPC,在网上学习模型不确定性,并立即予以补偿,大大改善非适应基线的性能,并尽量减少计算间接费用。我们拟议的结构将许多不同的环境普遍化,我们从这些环境中评估风力、未知有效载荷和高度灵活的飞行条件。拟议方法显示了巨大的灵活性和稳健性,90%以上跟踪非适应性NMPC的误差减少,其影响大为未知,且不作任何调整。此外,同样获得相同收益的控制器可以准确飞行高度敏捷速的轨道,显示70公里/小时的最高速度。我们提议的结构将跟踪50%左右的性能改进与我们非源接受的NaptomatMP的开放基线值。