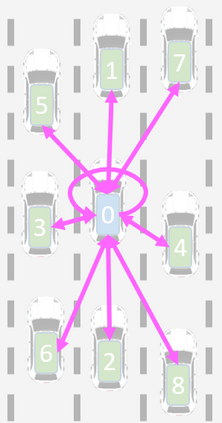
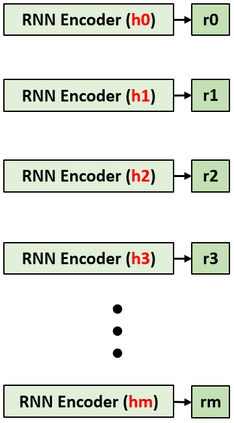
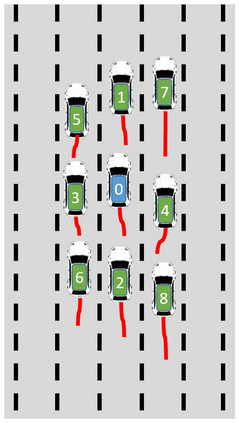
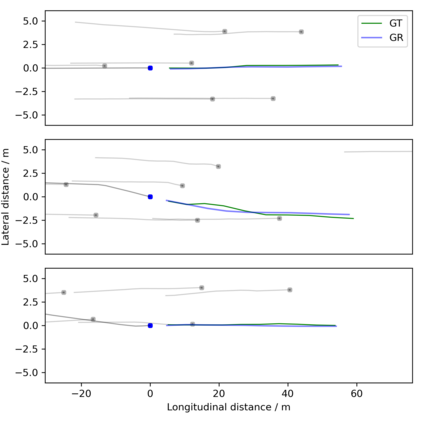
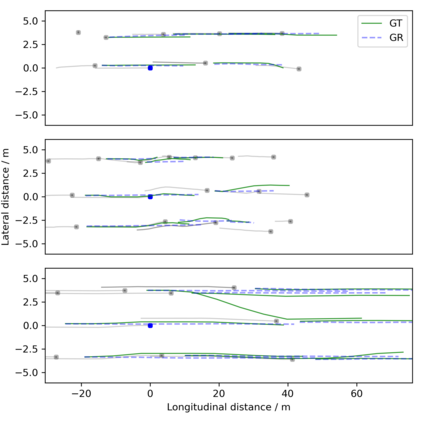
Integrating trajectory prediction to the decision-making and planning modules of modular autonomous driving systems is expected to improve the safety and efficiency of self-driving vehicles. However, a vehicle's future trajectory prediction is a challenging task since it is affected by the social interactive behaviors of neighboring vehicles, and the number of neighboring vehicles can vary in different situations. This work proposes a GNN-RNN based Encoder-Decoder network for interaction-aware trajectory prediction, where vehicles' dynamics features are extracted from their historical tracks using RNN, and the inter-vehicular interaction is represented by a directed graph and encoded using a GNN. The parallelism of GNN implies the proposed method's potential to predict multi-vehicular trajectories simultaneously. Evaluation on the dataset extracted from the NGSIM US-101 dataset shows that the proposed model is able to predict a target vehicle's trajectory in situations with a variable number of surrounding vehicles.
翻译:将轨迹预测纳入模块自主驾驶系统的决策和规划模块预计将提高自驾驶车辆的安全和效率,但车辆未来轨迹预测是一项艰巨的任务,因为它受到相邻车辆社会互动行为的影响,而且相邻车辆的数量在不同情况下会有所不同。 这项工作提议建立一个基于GNN-RNNN的Encoder-Decoder网络,用于互动观测轨迹预测,其中车辆的动态特征用RNN从其历史轨迹中提取,而车辆之间的相互作用则由使用GNN的定向图表和编码来体现。 GNN的平行性意味着拟议方法有可能同时预测多轨迹。 对NGSIM US-101数据集中提取的数据集的评估表明,拟议的模型能够在周围车辆数量不一的情况下预测目标车辆的轨迹。