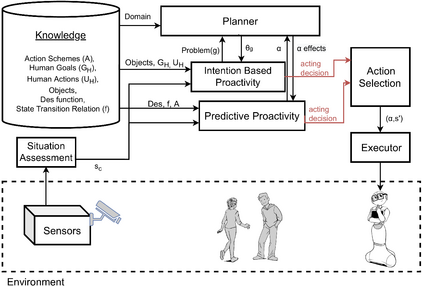
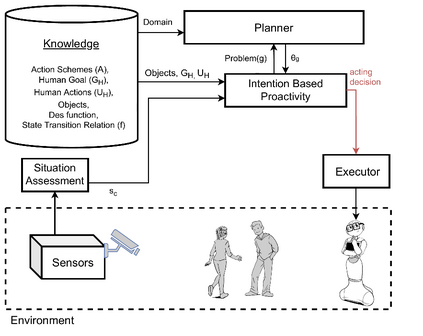
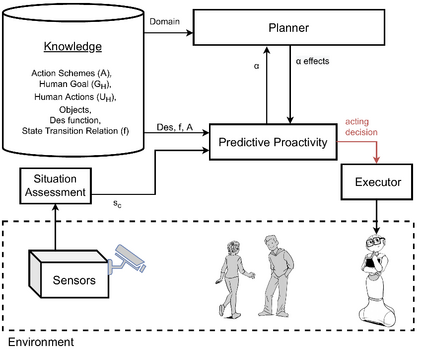
Robots sharing their space with humans need to be proactive in order to be helpful. Proactive robots are able to act on their own initiative in an anticipatory way to benefit humans. In this work, we investigate two ways to make robots proactive. One way is to recognize humans' intentions and to act to fulfill them, like opening the door that you are about to cross. The other way is to reason about possible future threats or opportunities and to act to prevent or to foster them, like recommending you to take an umbrella since rain has been forecasted. In this paper, we present approaches to realize these two types of proactive behavior. We then present an integrated system that can generate proactive robot behavior by reasoning on both factors: intentions and predictions. We illustrate our system on a sample use case including a domestic robot and a human. We first run this use case with the two separate proactive systems, intention-based and prediction-based, and then run it with our integrated system. The results show that the integrated system is able to take into account a broader variety of aspects that are needed for proactivity.
翻译:与人类共享空间的机器人需要积极主动地采取行动才能有所帮助。 主动的机器人能够主动地采取行动, 以预知的方式造福人类。 在这项工作中, 我们调查了两种方法来使机器人具有主动性。 一种方法是承认人类的意图, 并采取行动去实现这些意图, 比如打开你即将穿过的大门。 另一种方法是解释未来可能的威胁或机会, 并采取行动来防止或扶植它们, 比如建议你使用伞, 因为雨雨已经预测了。 在本文中, 我们提出实现这两种主动行为的方法。 我们然后提出一个综合系统, 通过两种因素的推理来产生主动的机器人行为: 意图和预测。 我们用一个样本来说明我们的系统, 包括一个家用机器人和一个人类。 我们首先用两个独立的主动系统来运行这个使用案例, 以意图为基础和预测为基础, 然后用我们的综合系统运行它。 结果显示, 集成系统能够考虑到更广阔的方面, 来进行主动性。