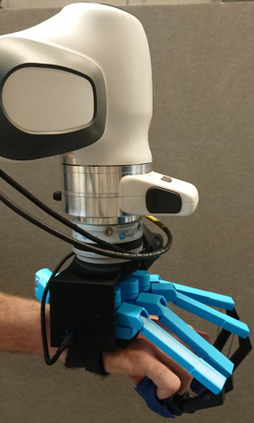
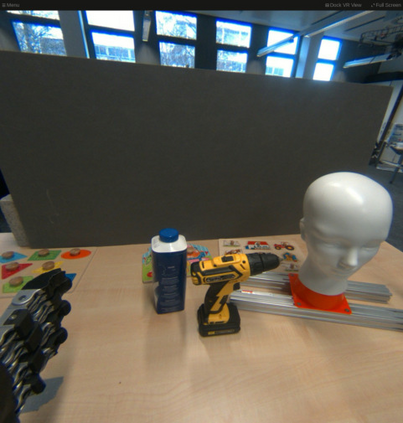
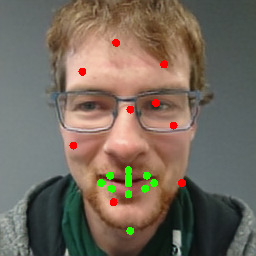
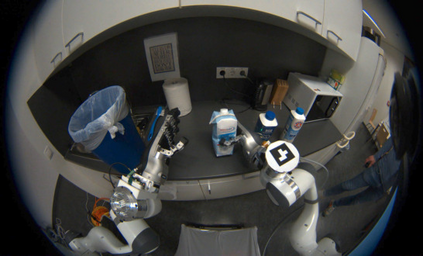
Robotic avatars promise immersive teleoperation with human-like manipulation and communication capabilities. We present such an avatar system, based on the key components of immersive 3D visualization and transparent force-feedback telemanipulation. Our avatar robot features an anthropomorphic bimanual arm configuration with dexterous hands. The remote human operator drives the arms and fingers through an exoskeleton-based operator station, which provides force feedback both at the wrist and for each finger. The robot torso is mounted on a holonomic base, providing locomotion capability in typical indoor scenarios, controlled using a 3D rudder device. Finally, the robot features a 6D movable head with stereo cameras, which stream images to a VR HMD worn by the operator. Movement latency is hidden using spherical rendering. The head also carries a telepresence screen displaying a synthesized image of the operator with facial animation, which enables direct interaction with remote persons. We evaluate our system successfully both in a user study with untrained operators as well as a longer and more complex integrated mission. We discuss lessons learned from the trials and possible improvements.
翻译:机器人自动操作员将手臂和手指通过一个基于外骨骼的操作员站驱动,该站提供手腕和每个手指的强力反馈。机器人通灵安装在Holonomic基地,在典型的室内情景中提供移动能力,使用3D舵装置加以控制。最后,机器人装有一台6D移动头,配有立体摄像机,将图像传送到操作员穿戴的VR HMD上。动作拉长是用球形显示隐藏的。头部还带有远程屏幕,显示操作员与面部动动画的合成图像,从而能够与远程人直接互动。我们成功地在用户研究中与未受训练的操作员进行了系统改进,作为长期和更为复杂的综合的任务。我们讨论了可能的经验教训。