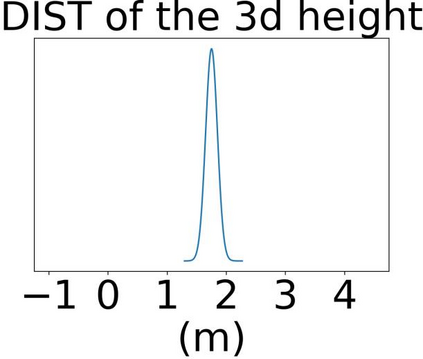
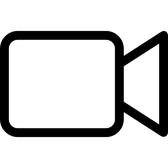
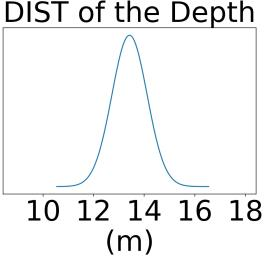
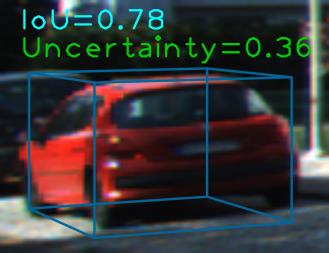
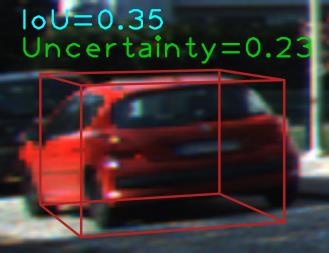
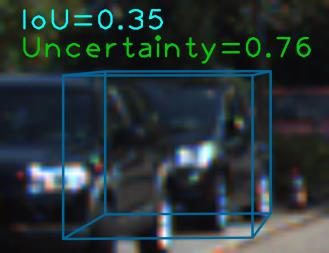
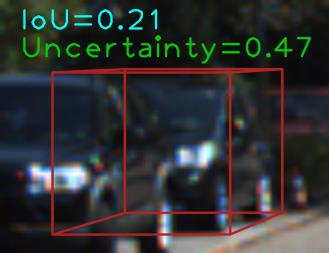
Geometry Projection is a powerful depth estimation method in monocular 3D object detection. It estimates depth dependent on heights, which introduces mathematical priors into the deep model. But projection process also introduces the error amplification problem, in which the error of the estimated height will be amplified and reflected greatly at the output depth. This property leads to uncontrollable depth inferences and also damages the training efficiency. In this paper, we propose a Geometry Uncertainty Projection Network (GUP Net) to tackle the error amplification problem at both inference and training stages. Specifically, a GUP module is proposed to obtains the geometry-guided uncertainty of the inferred depth, which not only provides high reliable confidence for each depth but also benefits depth learning. Furthermore, at the training stage, we propose a Hierarchical Task Learning strategy to reduce the instability caused by error amplification. This learning algorithm monitors the learning situation of each task by a proposed indicator and adaptively assigns the proper loss weights for different tasks according to their pre-tasks situation. Based on that, each task starts learning only when its pre-tasks are learned well, which can significantly improve the stability and efficiency of the training process. Extensive experiments demonstrate the effectiveness of the proposed method. The overall model can infer more reliable object depth than existing methods and outperforms the state-of-the-art image-based monocular 3D detectors by 3.74% and 4.7% AP40 of the car and pedestrian categories on the KITTI benchmark.
翻译:预测是单眼 3D 对象探测中一种强大的深度估计方法。 它估计深度取决于高度, 它在深度模型中引入数学前缀。 但是, 预测过程也引入了错误放大问题, 其中估计高度的错误会放大, 并在输出深度中大大反映。 此属性会导致无法控制的深度推断, 并损害培训效率。 在本文中, 我们提议一个地理测量不确定预测网络( GUP Net ), 以解决在推断和培训阶段的错误放大问题。 具体地说, 提议一个 GUP 模块, 以获得推断深度的地质测量指导不确定性, 这不仅为每个深度提供高度的高度高度高度的可靠信心, 而且还有利于深度的学习。 此外, 在培训阶段, 我们提出一个等级任务学习策略, 以减少错误放大造成的不稳定。 这个学习算法通过一个基础指标来监测每项任务的学习情况, 并根据其任务前任务状况, 以适应的方式为不同的任务分配适当的损失权重 。 基于此, 每个任务, 每一个任务都要开始学习一个目标, 它不仅为每个深度提供高度的地理测量指导, 并且只有它之前的精确的精确的轨道 。 KILILIT 的精确的实验过程, 。 能够以大大地 改进现有的方法 。 。 。 。 改进现有的精确的方法, 。