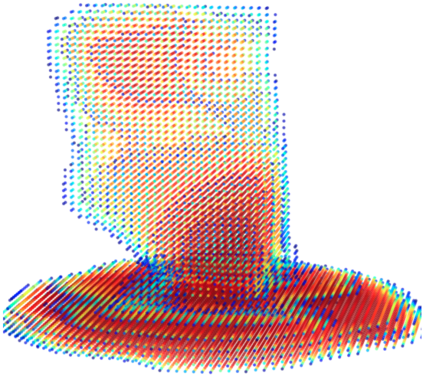
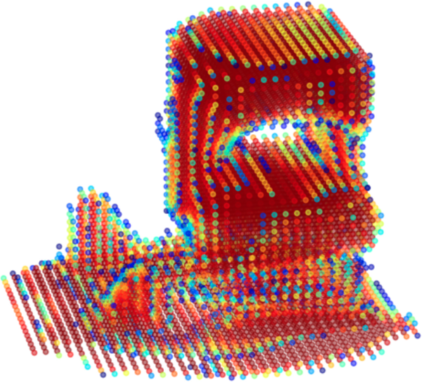
We propose Parallelised Diffeomorphic Sampling-based Motion Planning (PDMP). PDMP is a novel parallelised framework that uses bijective and differentiable mappings, or diffeomorphisms, to transform sampling distributions of sampling-based motion planners, in a manner akin to normalising flows. Unlike normalising flow models which use invertible neural network structures to represent these diffeomorphisms, we develop them from gradient information of desired costs, and encode desirable behaviour, such as obstacle avoidance. These transformed sampling distributions can then be used for sampling-based motion planning. A particular example is when we wish to imbue the sampling distribution with knowledge of the environment geometry, such that drawn samples are less prone to be in collisions. To this end, we propose to learn a continuous occupancy representation from environment occupancy data, such that gradients of the representation defines a valid diffeomorphism and is amenable to fast parallel evaluation. We use this to "morph" the sampling distribution to draw far fewer collision-prone samples. PDMP is able to leverage gradient information of costs, to inject specifications, in a manner similar to optimisation-based motion planning methods, but relies on drawing from a sampling distribution, retaining the tendency to find more global solutions, thereby bridging the gap between trajectory optimisation and sampling-based planning methods.
翻译:我们提出了基于平行的Diffeodrophic 取样模型(PDMP ) 。 PDMP 是一个新颖的平行框架,它使用双向和不同的映射,或二面形图谱,以类似于正常流的方式改变抽样运动规划者的抽样分布,类似于正常流流。 不同于使用垂直神经网络结构来代表这些畸形的正常流模式,我们从斜度信息中开发出它们,并编码适当的行为,例如避免障碍。这些变化后的采样分布可以用于基于取样的运动规划。一个特别的例子就是,我们希望以环境几何测量知识来将采样分布植入采样中,这样采样的样本就不太容易发生碰撞。为此,我们提议从环境占用数据中学习持续的占用性代表,这样,表示的梯度就定义了有效的二面形特征,并且容易进行快速平行评估。我们用这个“变形”抽样分布来绘制更多的碰撞易发样品。 PDMP 能够利用成本的梯度信息,在选择性规划方法中,从而在选择方向上选择方向上选择一种方法。