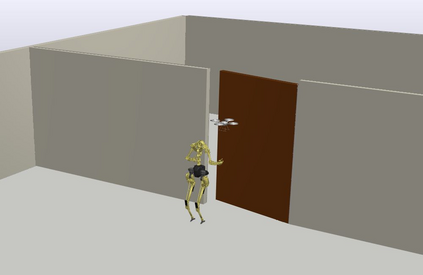
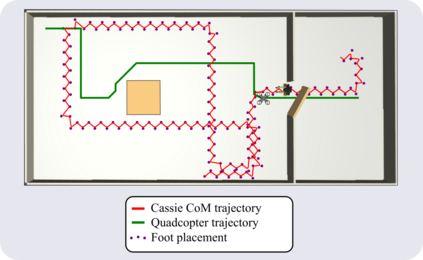
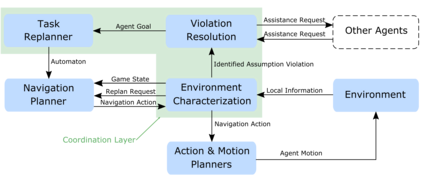
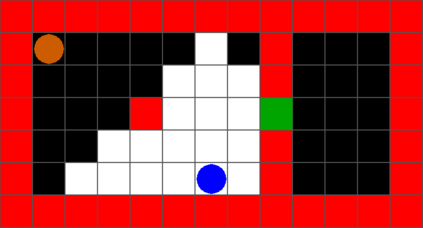
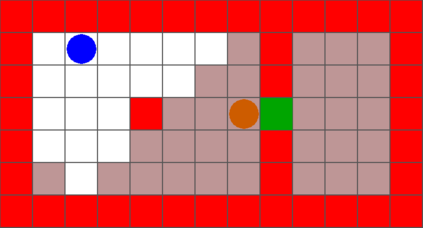
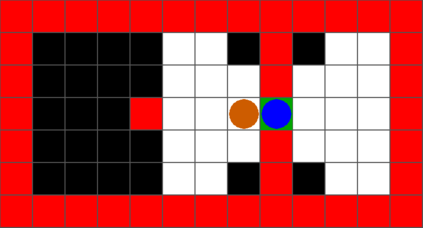
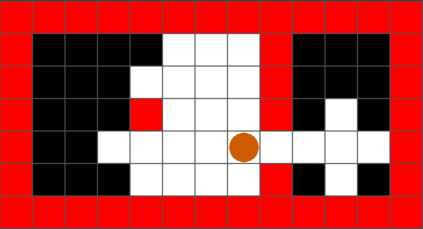
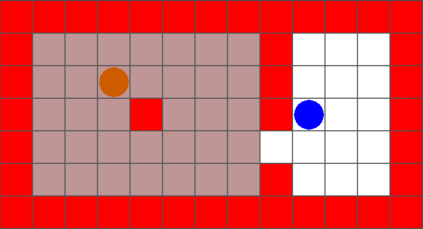
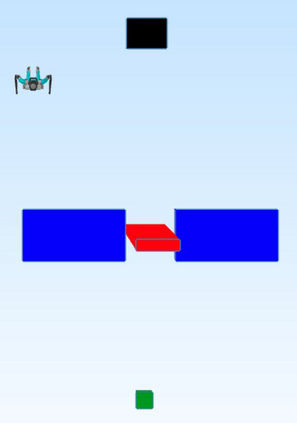
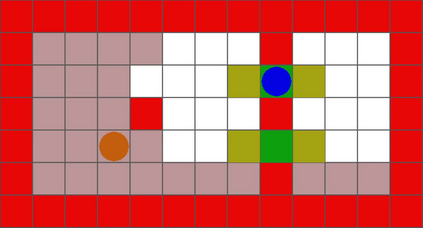
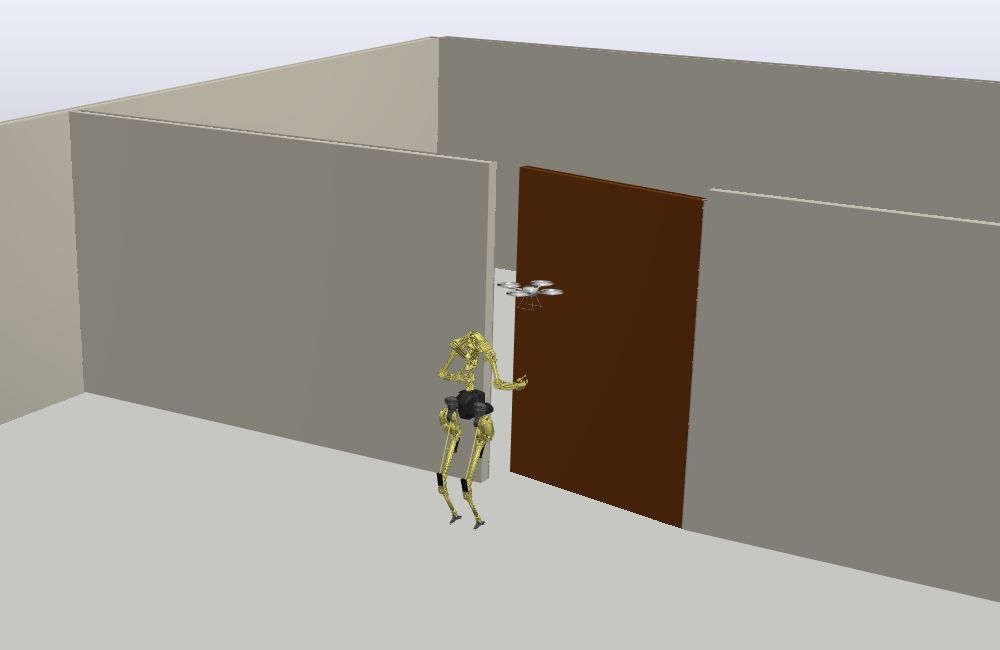
In this paper, we introduce a high-level controller synthesis framework that enables teams of heterogeneous agents to assist each other in resolving environmental conflicts that appear at runtime. This conflict resolution method is built upon temporal-logic-based reactive synthesis to guarantee safety and task completion under specific environment assumptions. In heterogeneous multi-agent systems, every agent is expected to complete its own tasks in service of a global team objective. However, at runtime, an agent may encounter un-modeled obstacles (e.g., doors or walls) that prevent it from achieving its own task. To address this problem, we employ the capabilities of other heterogeneous agents to resolve the obstacle. A controller framework is proposed to redirect agents with the capability of resolving the appropriate obstacles to the required target when such a situation is detected. Three case studies involving a bipedal robot Digit and a quadcopter are used to evaluate the controller performance in action. Additionally, we implement the proposed framework on a physical multi-agent robotic system to demonstrate its viability for real world applications.
翻译:在本文中,我们引入了一个高级控制器综合框架,使各不同物剂小组能够互相协助,解决在运行时出现的环境冲突。这一冲突解决方法建立在基于时间的被动合成基础上,以保证在特定环境假设下安全和完成任务。在多种物剂系统中,每个物剂都有望完成自己的任务,为全球团队的目标服务。然而,在运行时,一个物剂可能遇到非模型化障碍(如门或墙),使其无法完成自己的任务。为解决这一问题,我们利用其他不同物剂的能力来消除障碍。提议采用一种控制器框架,在发现这种情况时,将能够解决适当障碍以达到所需目标的物剂重新定位。使用三套双肢机器人Digit和四肢电脑的案例研究来评估控制器在行动中的性能。此外,我们实施了关于物理多物剂机器人系统的拟议框架,以证明其在现实世界应用方面的可行性。