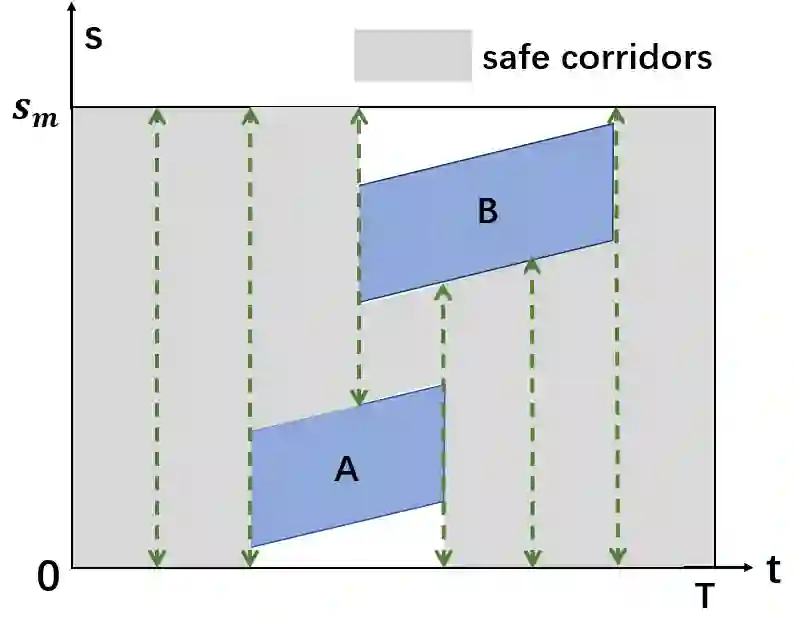
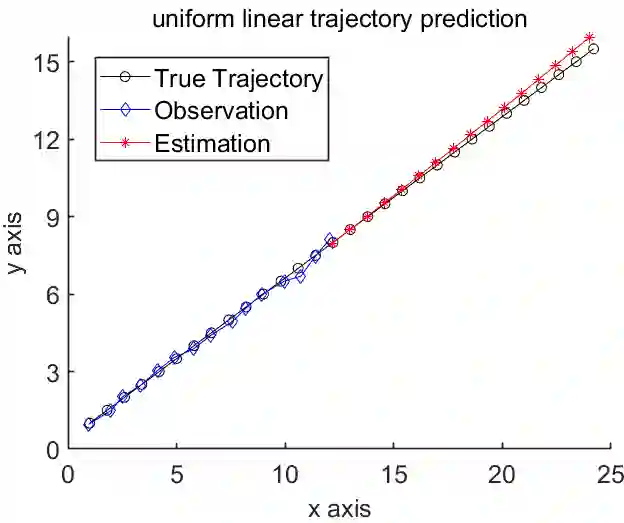
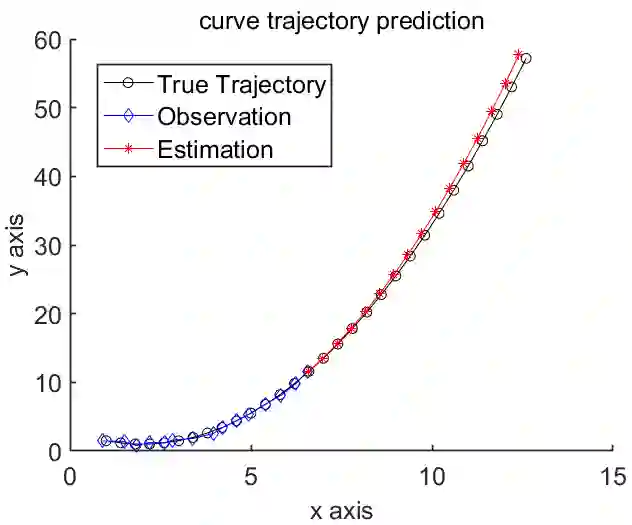
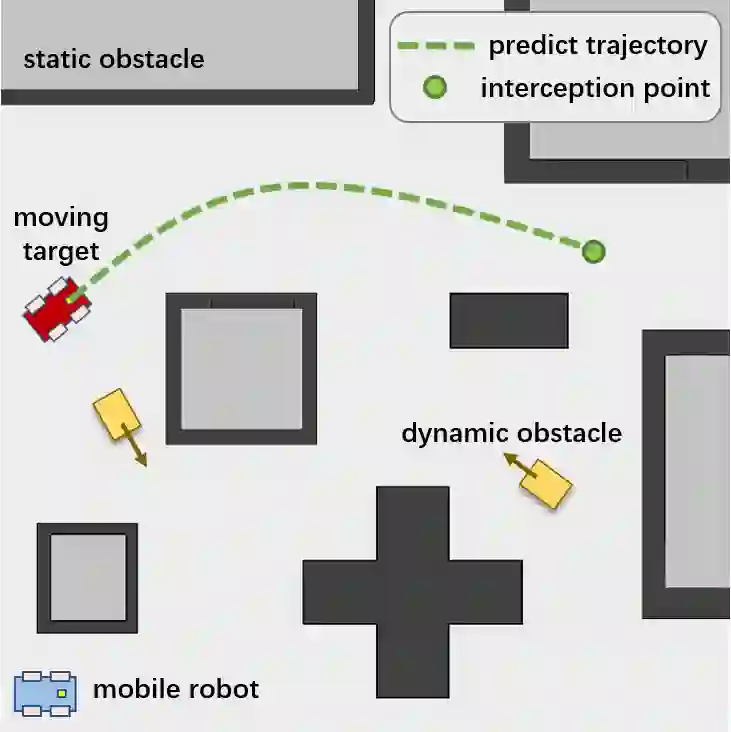
The interception of moving targets is a widely studied issue. In this paper, we propose an algorithm of intercepting the moving target with a wheeled mobile robot in a dynamic environment. We first predict the future position of the target through polynomial fitting. The algorithm then generates an interception trajectory with path and speed decoupling. We use Hybrid A* search to plan a path and optimize it via gradient decent method. To avoid the dynamic obstacles in the environment, we introduce ST graph for speed planning. The speed curve is represented by piecewise B\'ezier curves for further optimization. Compared with other interception algorithms, we consider a dynamic environment and plan a safety trajectory which satisfies the kinematic characteristics of the wheeled robot while ensuring the accuracy of interception. Simulation illustrates that the algorithm successfully achieves the interception tasks and has high computational efficiency.
翻译:拦截移动目标是一个广泛研究的问题。 在本文中, 我们提出在动态环境中用轮式移动机器人拦截移动目标的算法。 我们首先通过多式装配预测目标的未来位置。 算法随后产生一条截取路径和速度脱钩的轨迹。 我们使用混合 A* 搜索来规划一条路径, 并通过梯度等式方法优化它。 为了避免环境中的动态障碍, 我们引入ST 图表来进行速度规划。 速度曲线由小盘 B\' ezier 曲线代表, 以便进一步优化。 与其他截取算法相比, 我们考虑一个动态环境, 并计划一个安全轨迹, 满足轮式机器人的动态特征, 同时确保截取的准确性。 模拟显示算法成功完成截取任务, 并且具有很高的计算效率 。