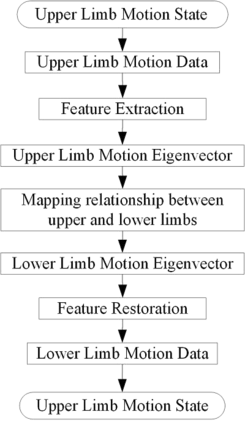
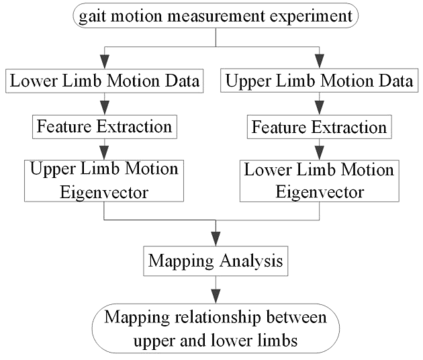
In recent years, the research of rehabilitation robot technology has become a hotspot in the field of rehabilitation medicine engineering and robotics. To assist active rehabilitation in patients with unilateral lower extremity injury, we propose a new self-service rehabilitation training method to control the injured lower extremity through its contralateral healthy upper limbs. Firstly, the movement data of upper limbs and lower limbs of healthy people in normal walking state are obtained by gait measurement experiment. Secondly, the eigenvectors of upper limb and lower limb movements in a single movement cycle are extracted respectively. Thirdly, the linear mapping relationship between the upper limbs movement and the lower limbs movement is identified using the least squares method. Finally, the simulation experiment of self-service rehabilitation training is implemented on MATLAB/Simulink. The results indicate that the identified linear mapping model can achieve good accuracy and adaptability. The self-service rehabilitation training method is effective for helping patients with unilateral limb injury to make rehabilitation training on themselves.
翻译:近年来,康复机器人技术研究已成为康复医学工程和机器人领域的一个热点。为了帮助单方下肢损伤患者积极康复,我们提议采用新的自我服务康复培训方法,通过相对健康的上肢控制受伤的下肢。首先,健康人群在正常行走状态下的上肢和下肢的移动数据通过步态测量实验获得。第二,在单一运动周期中分别提取上肢和下肢运动的叶质。第三,使用最小方位方法确定上肢运动和下肢运动之间的线性绘图关系。最后,在MATLAB/Simmlink上实施了自我服务康复培训模拟实验。结果显示,所确定的线性绘图模型可以实现良好的准确性和适应性。自助康复培训方法对于帮助单方肢体损伤患者进行康复培训非常有效。