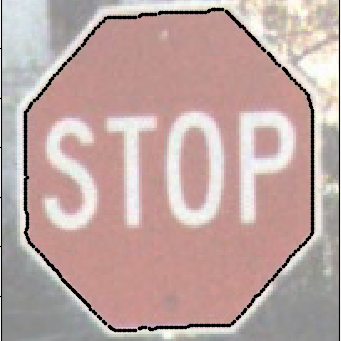
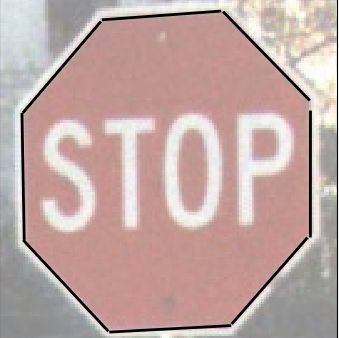
For use of cameras on an intelligent vehicle, driving over a major bump could challenge the calibration. It is then of interest to do dynamic calibration. What structures can be used for calibration? How about using traffic signs that you recognize? In this paper an approach is presented for dynamic camera calibration based on recognition of stop signs. The detection is performed based on convolutional neural networks (CNNs). A recognized sign is modeled as a polygon and matched to a model. Parameters are tracked over time. Experimental results show clear convergence and improved performance for the calibration.
翻译:在智能飞行器上使用相机时,驾驶大撞车可能会对校准提出挑战。 那么, 进行动态校准是值得注意的。 校准可以使用哪些结构? 如何使用您所识别的交通标志? 本文介绍了根据对停止标志的识别进行动态摄像校准的方法。 检测以进化神经网络(CNNs)为基础进行。 一个公认的标志以多边形为模型,与模型相匹配。 参数会随时间跟踪。 实验结果显示校准明显趋同, 并改进了性能 。