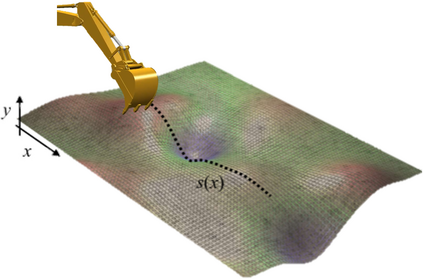
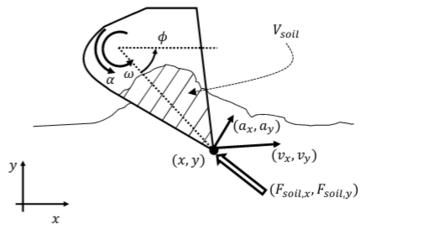
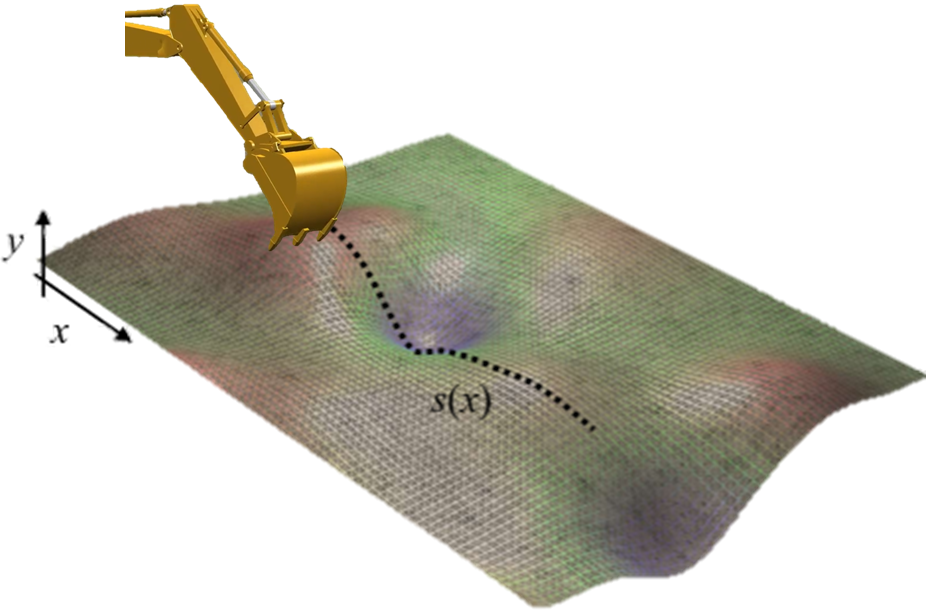
Effective and causal observable functions for low-order lifting linearization of nonlinear controlled systems are learned from data by using neural networks. While Koopman operator theory allows us to represent a nonlinear system as a linear system in an infinite-dimensional space of observables, exact linearization is guaranteed only for autonomous systems with no input, and finding effective observable functions for approximation with a low-order linear system remains an open question. Dual Faceted Linearization uses a set of effective observables for low-order lifting linearization, but the method requires knowledge of the physical structure of the nonlinear system. Here, a data-driven method is presented for generating a set of nonlinear observable functions that can accurately approximate a nonlinear control system to a low-order linear control system. A caveat in using data of measured variables as observables is that the measured variables may contain input to the system, which incurs a causality contradiction when lifting the system, i.e. taking derivatives of the observables. The current work presents a method for eliminating such anti-causal components of the observables and lifting the system using only causal observables. The method is applied to excavation automation, a complex nonlinear dynamical system, to obtain a low-order lifted linear model for control design.
翻译:使用神经网络从数据中学习到非线性操作员理论,允许我们将非线性系统作为可观测的无限空间的线性系统,但只保证没有输入的自主系统有精确线性,找到有效的可观测功能以近似低线性系统仍然是一个未决问题。双面线性线性系统使用一套有效的可观测功能,但方法需要了解非线性系统的物理结构。这里,提出了一套数据驱动方法,用以生成一套非线性可观测功能,可以精确地将非线性控制系统近似于低线性线性线性控制系统。在使用测量变量数据时,作为可观察性的一个洞察点,即测量变量可能包含对系统的投入,这在解除系统时会产生因果关系问题,即采用可观测的衍生物。目前的工作提出了一种方法,用来消除非线性观测系统物理结构的这种非线性功能,并且仅使用因果性观测结果而提升系统。在使用低线性线性测试时,使用一种方法将测量变量数据精确地应用于一种动态设计自动化系统。