

项目名称: 点云语义特征识别算法及其在产品三维重建中的应用
项目编号: No.61303087
项目类型: 青年科学基金项目
立项/批准年度: 2014
项目学科: 自动化技术、计算机技术
项目作者: 杨红娟
作者单位: 山东建筑大学
项目金额: 23万元
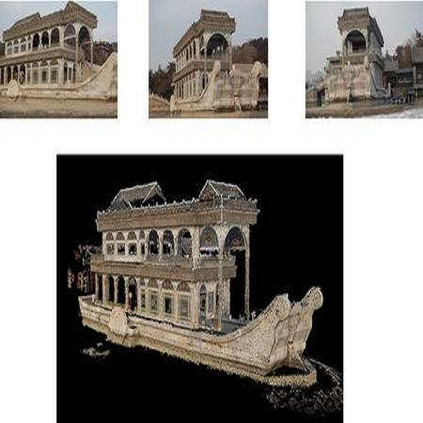
中文摘要: 三维重建在产品自主创新、以三维模型为基础的视觉检测与控制应用方面,具有重要的理论价值。产品语义特征建模框架记录了产品正向设计的过程信息,为数据点云的几何信息和拓扑信息准确、全面理解提供了一种实现思路。本项目提出复杂产品数据点云语义特征识别与三维重建研究。研究基于SIFT特征的多视数据点云拼合,提高数据点云拼合方法在尺度变化、视角变化方面的稳定性。受人类视觉识别系统"定位,定向,带通"认识事物的规律的启发,提出基于多尺度、多方向几何分析的数据点云分割方法,解决数据分割的基础问题。通过研究数据点云中点、线、面几何信息和拓扑信息的识别,表达产品模型的整体几何属性和局部几何属性。采用多面体半边数据结构建立语义特征结构,研究满足语义特征结构的几何形体参数属性还原,提高三维重建的精度。本项目的研究为产品自主创新、以三维模型为基础的视觉检测与控制应用提供理论依据和实现技术,具有重要的科学意义和研究价值。
中文关键词: 三维重建;语义特征;多尺度多方向分析;约束识别;
英文摘要: 3D reconstruction has important theoretical value in product independent innovation and vision detection and control application based on 3D model. The product semantics feature frame record the process of product's forward design. It put forwards basic thought route of realizing the geometry information and topology information accurately and comprehensively understanding from data point. Semantic feature identification and 3D reconstruction are studied from complex product data point. For multi-view point data, registration and integration is researched based on SIFT feature to improve the stability in scale change and visual angle. Human vision recognition system understands things according to "the localization, the direction detection, the band pass". Inspired by the rule, a segmentation method is proposed to solve the basic data point segmentation problem based on multi-scales and multi-directions geometric analysis. The product model's overall geometry attribute and partial geometry attribute are illustrate by recognizing geometry information and topology information between points, lines and surfaces from data point. The polyhedron half data structure is used to establish the semantics feature structure. According to the semantic feature structure, geometry shapes parameter attributes are restored to imp
英文关键词: 3D reconstruction;Semantic feature;Multi scales and directions analysis;Constraint identification;
成为VIP会员查看完整内容
相关内容
在计算机视觉中, 三维重建是指根据单视图或者多视图的图像重建三维信息的过程. 由于单视频的信息不完全,因此三维重建需要利用经验知识. 而多视图的三维重建(类似人的双目定位)相对比较容易, 其方法是先对摄像机进行标定, 即计算出摄像机的图象坐标系与世界坐标系的关系.然后利用多个二维图象中的信息重建出三维信息。
物体三维重建是计算机辅助几何设计(CAGD)、计算机图形学(CG)、计算机动画、计算机视觉、医学图像处理、科学计算和虚拟现实、数字媒体创作等领域的共性科学问题和核心技术。在计算机内生成物体三维表示主要有两类方法。一类是使用几何建模软件通过人机交互生成人为控制下的物体三维几何模型,另一类是通过一定的手段获取真实物体的几何形状。前者实现技术已经十分成熟,现有若干软件支持,比如:3DMAX、Maya、AutoCAD、UG等等,它们一般使用具有数学表达式的曲线曲面表示几何形状。后者一般称为三维重建过程,三维重建是指利用二维投影恢复物体三维信息(形状等)的数学过程和计算机技术,包括数据获取、预处理、点云拼接和特征分析等步骤。
Arxiv
0+阅读 · 2022年4月16日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月16日