“事后诸葛亮”经验池:轻松解决强化学习最棘手问题之一:稀疏奖励
AI WORLD 2019 世界人工智能峰会精彩重放!
10 月 18 日,2019 中关村论坛平行论坛 ——AI WORLD 2019 世界人工智能峰会在北京启幕。新智元杨静、科大讯飞胡郁、微软王永东、华为王成录、英特尔宋继强、旷视及智源学者孙剑、滴滴叶杰平、AWS 张峥、依图颜水成、地平线黄畅、autowise.ai 黄超等重磅嘉宾中关村论剑,重启充满创新活力的 AI 未来。峰会现场,新智元揭晓 AI Era 创新大奖,并重磅发布 AI 开放创新平台和献礼新书《智周万物:人工智能改变中国》。回放链接:
新智元AI WORLD 2019
【新智元导读】强化学习最棘手的问题之一就是稀疏奖励。本文阐述了一个新颖的技术:Hindsight Experience Replay(HER),可以从稀疏、二分的奖励问题中高效采样并进行学习,而且可以应用于所有的Off-Policy算法中。这项技术突破点在哪里,快来新智元 AI 朋友圈与大咖一起讨论~
论文链接:
https://arxiv.org/pdf/1707.01495.pdf
本文介绍了一个“事后诸葛亮”的经验池机制,简称为HER,它可以很好地应用于稀疏奖励和二分奖励的问题中,不需要复杂的奖励函数工程设计。强化学习问题中最棘手的问题之一就是稀疏奖励。本文提出了一个新颖的技术:Hindsight Experience Replay (HER),可以从稀疏、二分的奖励问题中高效采样并进行学习,而且可以应用于所有的Off-Policy算法中。
Hindsight意为"事后",结合强化学习中序贯决策问题的特性,我们很容易就可以猜想到,“事后”要不然指的是在状态s下执行动作a之后,要不然指的就是当一个episode结束之后。其实,文中对常规经验池的改进也正是运用了这样的含义。
" HER lets an agent learn from undesired outcomes and tackles the problem of sparse rewards in Reinforcement Learning (RL).——Zhao, R., & Tresp, V. (2018). Energy-Based Hindsight Experience Prioritization. CoRL."
使智能体从没达到的结果中去学习,解决了强化学习中稀疏奖励的问题。
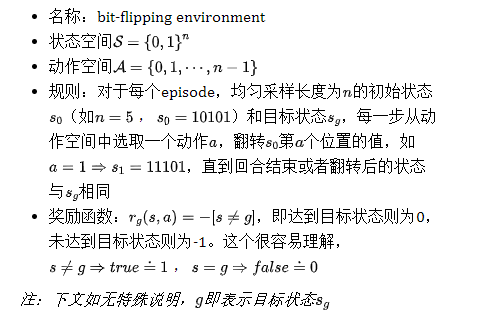
二分奖励(binary reward):完成目标为一个值,没完成目标为另一个值。如:

奖励(sparse reward):完成目标的episode太少或者完成目标的步数太长,导致负奖励的样本数过多。
在机器人领域,要想使强化学习训练它完美执行某任务,往往需要设计合理的奖励函数,但是设计这样的奖励函数工程师不仅需要懂得强化学习的领域知识,也需要懂得机器人、运动学等领域的知识。而且,有这些知识也未必能设计出很好的奖励函数供智能体进行学习。因此,如果可以从简单的奖励函数(如二分奖励)学习到可完成任务的模型,那就不需要费心设计复杂的奖励函数了。
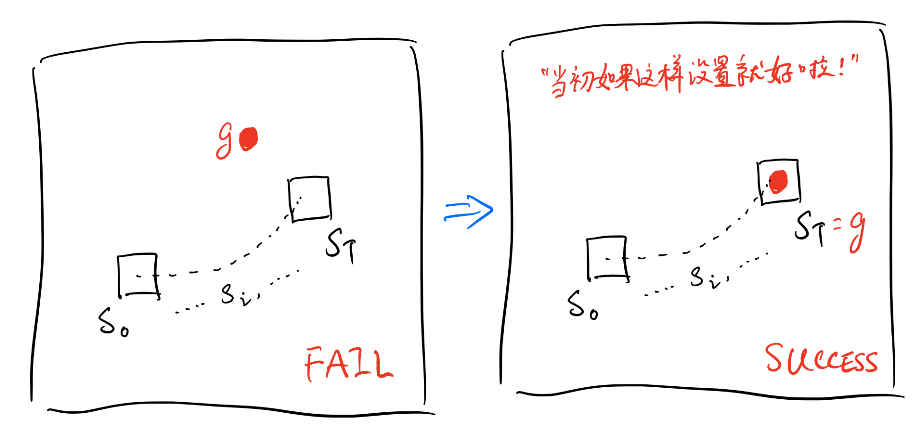
文中介绍了一个例子来引入HER:
-
使用shaped reward(简言之,将reward设计成某些变量的函数,如 ,即奖励函数为当前状态与目标状态的欧氏距离的负数),将训练的算法逐步引导至奖励函数增大的决策空间。但是这种方法可能很难应用于复杂的问题中
-
使用HER——事后经验池机制

-
传统经验池存入的是状态 ,而HER存入的是 ,也就是 tf.concat(s,g) -
训练算法的输入也是 ,也就是需要在当前状态后边连结上每个episode的目标状态,每个episode的目标状态可能不同 -
HER对经验池进行了扩充,不仅存入实际采样得到的transition/experience, ,也要在回合结束时重新设置目标状态,得到相应的奖励值(在二分奖励问题中,只有在 时奖励才需要更改),存入“事后”(当初如果这样就好啦!)的经验 ,详见伪代码,这个事后经验究竟存入多少份、多少种,由超参数 控制,下文讲解。 -
HER更适合解决多目标问题,多目标的意思为,目标点非固定,每个episode的目标状态可以不相同。详见实验部分
-
未来模式——future:在一个序列 中,如果遍历到状态 ,则在 之间随机抽取 个状态作为目标状态 ,并依此向经验池中存入 ,特点:一个episode的后续部分 -
回合模式——episode:在一个序列 中,如果遍历到状态 ,则在整个序列中随机抽取 个状态作为目标状态 ,并依此向经验池中存入 ,特点:一个episode -
随机模式——random:在一个序列 中,如果遍历到状态 ,则在多个序列 中随机抽取 个状态作为目标状态 ,并依此向经验池中存入 ,特点:多个episode -
最终模式——final:在一个序列 中,如果遍历到状态 ,则之间令 ,并向经验池中存入 ,特点:一个episode的最后一个状态,如果设置k,则存入k个相同的经验
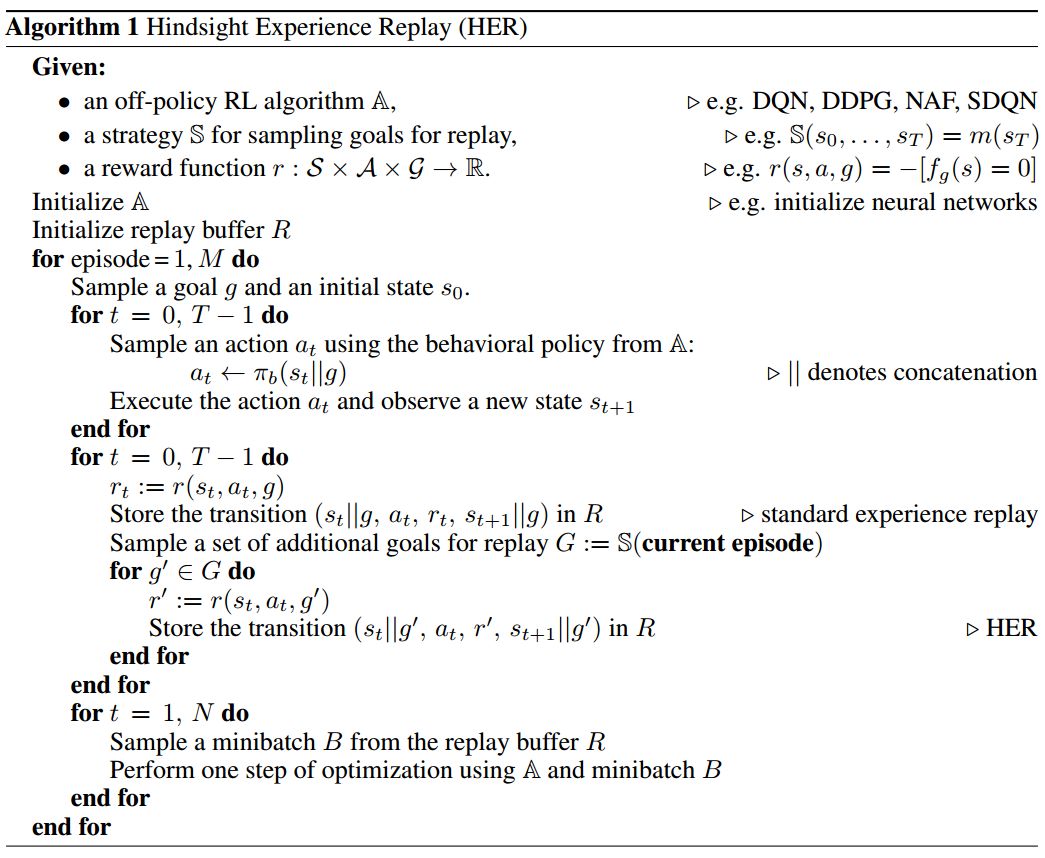
伪代码:
-
伪代码中没有提到超参数 ,其实在循环条件 中循环执行了 次 -
操作为连结操作,简言之,将两个长度为5的向量合并成一个长度为10的向量 -
即为上文提到的四种扩展模式:future、episode、random、final。 -
奖励函数 即为前文提到的 ,即完成为0,未完成为-1,具体奖励函数可以根据我们的使用环境设计 -
表示神经网络的输入为当前状态与目标状态的连结
HER的优点
-
可解决稀疏奖励、二分奖励问题 -
可适用于所有的Off-Policy算法 -
提升了数据采样效率
环境
-
7自由度机械臂 -
模拟环境:MuJoCo -
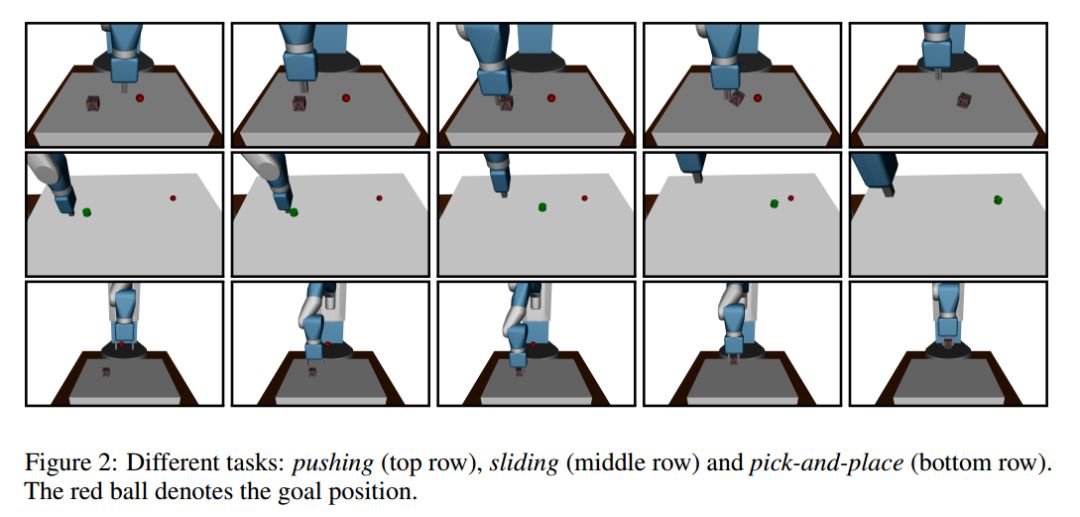
任务分为3种 -
Pushing,推:锁定机械臂的钳子,移动机械臂将物体推到目标点 -
Sliding,滑动:类似于冰球运动,锁定机械臂的钳子,移动机械臂给与物体一个力,使物体可以在较光滑的桌面上滑动并且达到目标位置 -
Pick-and-place,摆放:解锁钳子,使用机械臂夹起物体并移动至空中目标点

算法
-
DDPG -
Adam优化器 -
多层感知机MLPs -
ReLU激活函数 -
8核并行,更新参数后取平均 -
A-C网络都是3个隐藏层,每层64个隐节点,Actor输出层用tanh激活函数 -
经验池大小为 ,折扣因子 ,学习率 ,探索因子
-
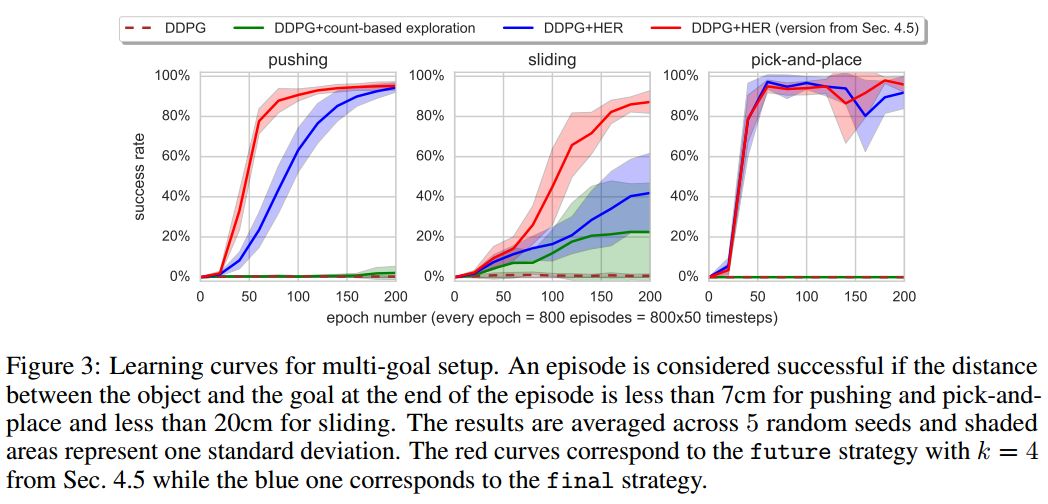
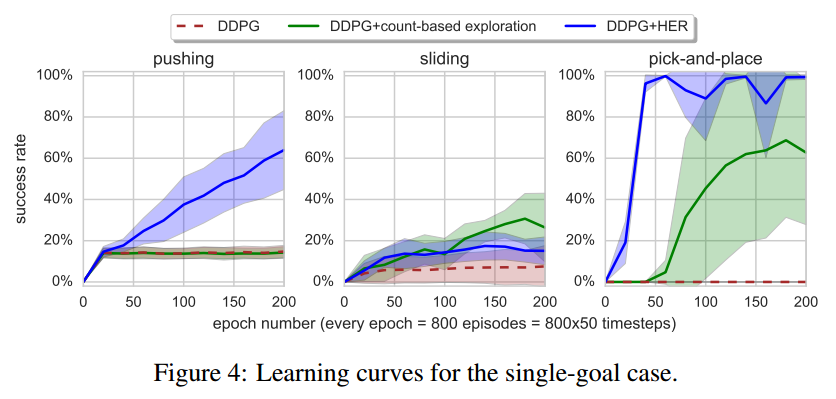
红色曲线为future模式,蓝色曲线为final模式,绿色曲线为使用了count-based的DDPG,褐红色虚线为原始DDPG -
从左至右依次是Pushing,Sliding,Pick-and-place任务 -
超参数 -
这个实验中,目标状态会变,即为多个目标状态
-
future模式比final效果更好 -
使用了count-based的DDPG智能稍微解决一下Sliding任务 -
使用HER的DDPG可以完全胜任三个任务 -
证明了HER是使从稀疏、二分奖励问题中学习成为可能的关键因素
单个目标状态的实验
-
蓝色曲线为使用了HER的DDPG,文中并未说明HER是哪种模式,猜测是final模式,因为文中实验部分之前都是以final模式进行举例 -
绿色曲线代表应用了count-based的DDPG,褐红色虚线为原始DDPG -
实验中,目标状态都为同一状态
-
DDPG+HER比原始DDPG的性能要好很多 -
相比于多个目标的实验,可以发现,在多目标的任务中DDPG训练更快,所以在实际中,即使我们只关心一个目标,我们最好也使用多个目标来训练
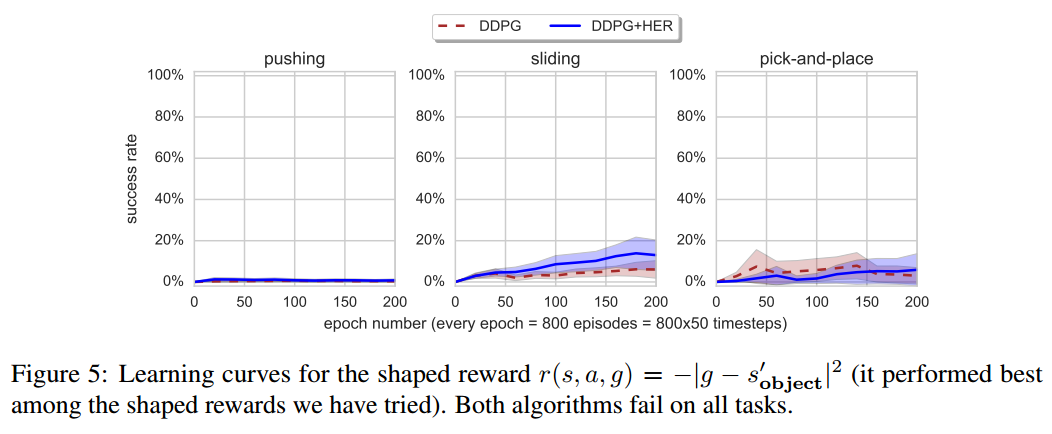
HER应用于reward shaping问题中
-
奖励函数为
-
无论使用怎样的reward shaping函数,DDPG、DDPG+HER都不能解决这个问题 -
作者认为原因有二:
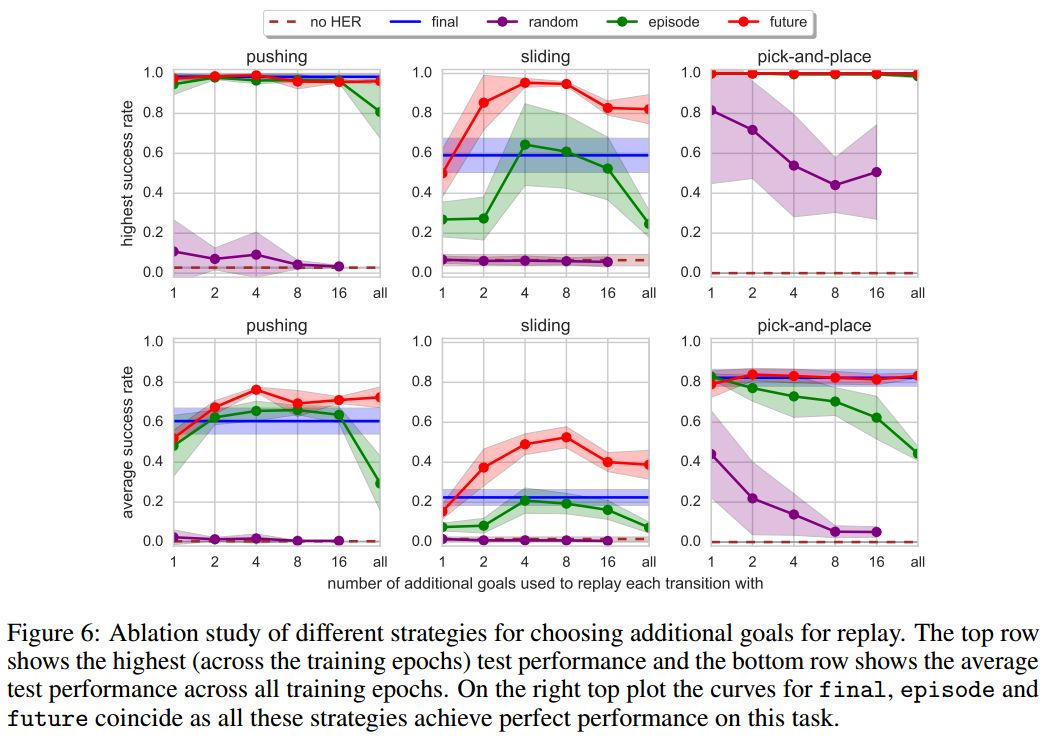
四种模式比较
-
红色代表future模式,蓝色代表final模式,绿色代表episode模式,紫色代表episode模式,褐红色虚线代表原始DDPG -
横坐标代表超参数 ,第一行三个图的纵坐标代表最高得分,第二行三个图的纵坐标代表平均得分
-
效果:future>final>episode>random>no HER -
稳定性:final(好)=no-HER(差)>future>episode>random -
future模式是唯一一个可以解决Sliding任务的,在 或者 时效果最好 -
增大 超过8会使性能有所下降,主要是因为 过大导致经验池中原始真实数据所占的比例太小 -
It confirms that the most valuable goals for replay are the ones which are going to be achieved in the near future 它证实了回放经验中最有价值的目标是那些在不久的将来能实现的目标