综述:军事应用中使用的一些重要算法
A 大规模随机规划问题
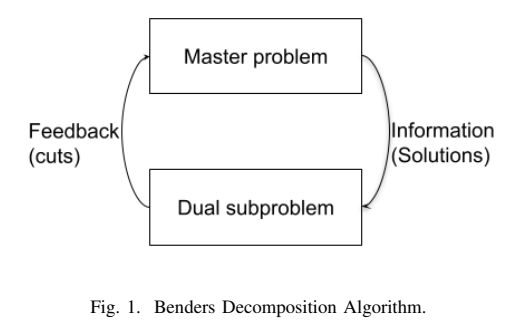
B 图像配准
C 视频拼接
D 模式识别算法
-
1)逻辑回归
-
2)online kNN
-
3)感知机
-
4)用于实时目标检测的神经网络
-
5)支持向量机(SVM)
-
6)k-means
-
7) 集成模型--Boosting
3 数据流
4 GaAs
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“gaas” 就可以获取《综述:军事应用中使用的一些重要算法》专知下载链接
欢迎微信扫一扫加专知助手,咨询使用专知,获取最新AI专业干货知识教程资料!




登录查看更多
相关内容
Arxiv
0+阅读 · 2022年9月15日

相关VIP内容
相关资讯