AI界的七大未解之谜:OpenAI丢出一组AI研究课题
今天,OpenAI在官方博客上丢出了7个研究过程中发现的未解决问题。
OpenAI希望这些问题能够成为新手入坑AI的一种有趣而有意义的方式,也帮助从业者提升技能。
OpenAI版AI界七大未解之谜,现在正式揭晓——

1. Slitherin
难度指数:☆☆
实现并解决贪吃蛇的多玩家版克隆作为Gym环境。
环境:场地很大,里面有多条蛇,蛇通过吃随机出现的水果生长,一条蛇在与另一条蛇、自己或墙壁相撞时即死亡,当所有的蛇都死了,游戏结束。
智能体:使用自己选择的自我对弈的RL算法解决环境问题。你需要尝试各种方法克服自我对弈的不稳定性。
检查学习行为:智能体是否学会了适时捕捉食物并避开其他蛇类?是否学会了攻击、陷害、或者联合起来对付竞争对手?

2. 分布式强化学习中的参数平均
难度指数:☆☆☆
这指的是探究参数平均方案对RL算法中样本复杂度和通信量影响。一种简单的解决方法是平均每个更新的每个worker的梯度,但也可以通过独立地更新worker、减少平均参数节省通信带宽。
这样做还有一个好处:在任何给定的时间内,我们都有不同参数的智能体,可能出现更好的探测行为。另一种可能是使用EASGD这样的算法,它可以在每次更新时将参数部分结合在一起。
3. 通过生成模型完成的不同游戏中的迁移学习
难度指数:☆☆☆
这个流程如下:
训练11个Atari游戏的策略。从每个游戏的策略中,生成1万个轨迹,每个轨迹包含1000步行动。
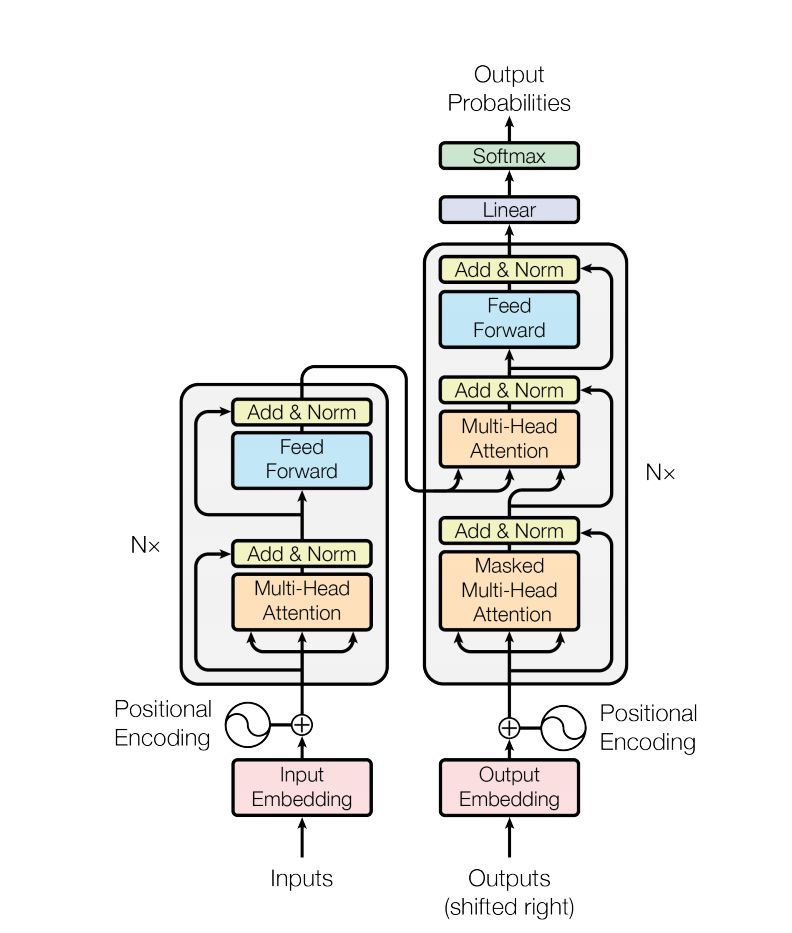
将一个生成模型(如论文Attention Is All You Need提出的Transformer)与10个游戏产生的轨迹相匹配。
然后,在第11场比赛中微调上述模型。
你的目标是量化10场比赛预训练时的好处。这个模型需要什么程度的训练才能发挥作用?当第11个游戏的数据量减少10x时,效果的大小如何变化?如果缩小100x呢?

4. 线性注意Transformer
难度指数:☆☆☆
Transformer模型使用的是softmax中的软注意力(soft attention)。如果可以使用线性注意力(linear attention),我们就能将得到的模型用于强化学习。
具体来说,在复杂环境下使用Transformer部署RL不切实际,但运行一个具有快速权重(fast weight)的RNN可行。
你的目标是接受任何语言建模任务,训练Transformer,然后找到一种在不增加参数总数情况下,用具有不同超参数的线性注意Transformer获取每个字符/字的相同位元的方法。
先给你泼盆冷水:这可能是无法实现的。再给你一个潜在的有用提示,与使用softmax注意力相比,线性注意转化器很可能需要更高的维度key/value向量,这能在不显著增加参数数量的情况下完成。
5. 已学习数据的扩充
难度指数:☆☆☆
可以用学习过的数据VAE执行“已学习数据的扩充”。
我们首先可能需要在输入数据上训练一个VAE,然后将每个训练点编码到一个潜在的空间,之后在其中应用一个简单(如高斯)扰动,最后解码回到观察的空间。用这种方法是否能得到更好的泛化,目前还是一个谜题。
这种数据扩充的一个潜在优势是,它可能包含视角变换、场景光纤变化等很多非线性转换。

6. 强化学习中的正则化
难度指数:☆☆☆☆
这指的是实验性研究和定性解释不同正则化方法对RL算法的影响。
在监督学习中,正则化对于优化模型和防止过拟合具有极其重要的意义,其中包含一些效果很赞的方法,如dropout、批标准化和L2正则化等。
然而,在策略梯度和Q-learning等强化学习算法上,研究人员还没有找到合适的正则化方法。顺便说一下,人们在RL中使用的模型要比在监督学习中使用的模型小得多,因为大模型表现更差。
这儿有一篇老论文供参考:
http://sologen.net/papers/RegularizationInReinforcementLearning(PhD-Dissertation-Farahmand).pdf
7. Olympiad Inequality问题的自动解决方案
难度指数:☆☆☆☆☆
Olympiad Inequality问题很容易表达,但解决这个问题往往需要巧妙的手法。
建立一个关于Olympiad Inequality问题的数据集,编写一个可以解决大部分问题的程序。目前还不清楚机器学习在这里是否有用,但你可以用一个学习的策略减少分支因素。
最后,附OpenAI原贴地址:
https://blog.openai.com/requests-for-research-2/
转载声明:本文转载自「量子位」,搜索「QbitAI」即可关注。
推荐阅读

乌镇峰会:人工智能的主场

尼克谈人工智能的历史、现实与未来





