工程实践 | CUDA优化之LayerNorm性能优化实践

作者 | 郭冉、姚迟、郑泽康、柳俊丞
来源 | OneFlow
编辑 | 极市平台
极市导读
工程实践干货,如何基于cuda将TransFormer中必备的LayerNorm算子优化到SOTA。 >>加入极市CV技术交流群,走在计算机视觉的最前沿

2020年末,OneFlow 发布了《OneFlow 性能优化分享:如何实现一个高效的 Softmax CUDA kernel?》,其中介绍了OneFlow深度优化后的Softmax,尤其对很多框架没有考虑的 half 类型做了充分优化,使得性能大幅超过了 cuDNN 的实现。
今天,奉上另一个重要算子 LayerNorm 的性能优化实践技术分享。
此外,OneFlow 还带上了可以独立使用的 OneFlow Softmax(具体见文末说明),欢迎大家试用、提建议。
1 OneFlow 性能优化后的测试结果
OneFlow 优化后的 LayerNorm 分别与 NVIDIA Apex、PyTorch 做了性能对比,测试结果显示,OneFlow LayerNorm 有明显的性能优势。
与 NVIDIA Apex 的对比结果
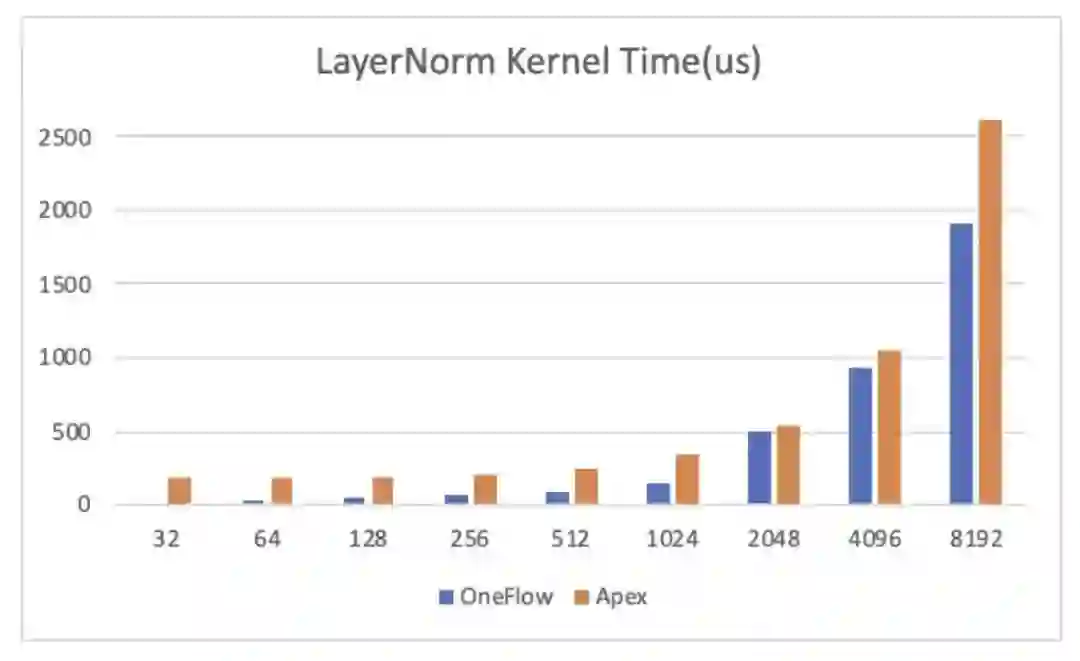
NVIDIA Apex 中实现了高效的 fused LayerNorm Kernel 来扩展 PyTorch 算子,我们对 OneFlow 优化后的 LayerNorm Kernel 和 NVIDIA Apex 进行了对比测试,测试结果如下:
横轴为 num_cols 大小,纵轴为 Kernel 执行需要的时间(越低越好):
我们将时间换算成访存带宽,结果如下,纵轴为 Kernel 达到的有效带宽(越高越好):
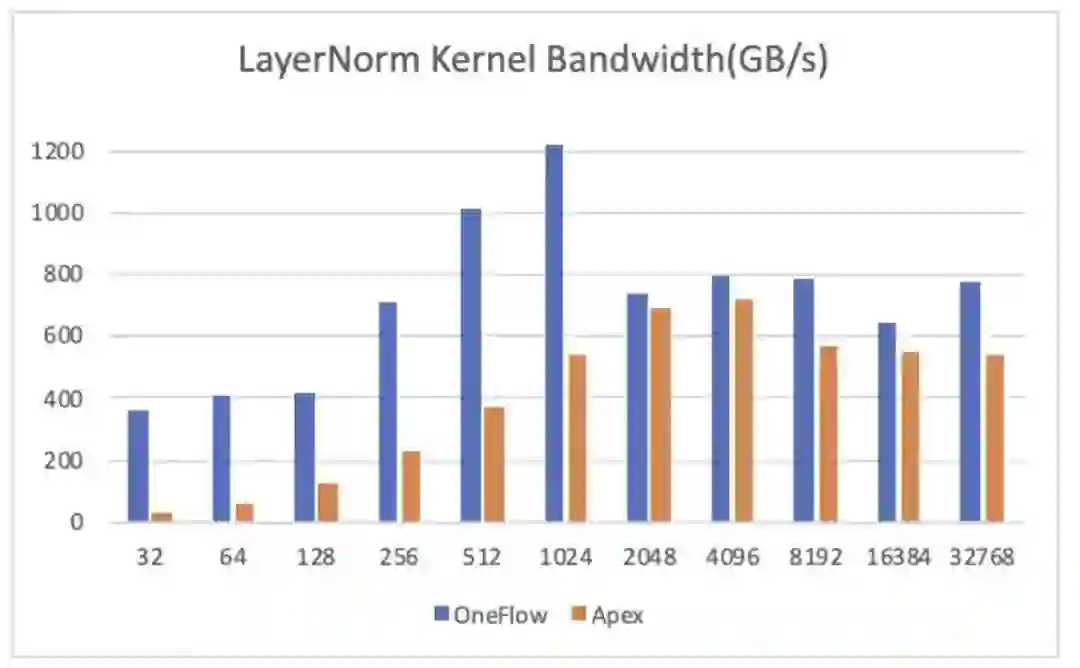
其中测试环境为 NVIDIA A100-PCIE-40GB GPU,数据类型为half, Shape =\(49152, num\_cols\),我们将最后一维动态变化,测试了从32到32768不同大小的 LayerNorm Kernel,可以看到在所有情况下,OneFlow 的 Kernel 执行时间和有效访存带宽都优于 Apex 的实现。
与 PyTorch 的对比结果
PyTorch 的 LayerNorm 暂时不支持 half 类型,因此我们用 float类型做了一组对照,需要注意的是PyTorch中LayerNorm是分两个CUDA Kernel(RowwiseMomentsCUDAKernel和LayerNormForwardCUDAKernel)做的,所以看起来性能比较差。
横轴为 num\_cols 大小,纵轴为 Kernel 执行需要的时间(越低越好):
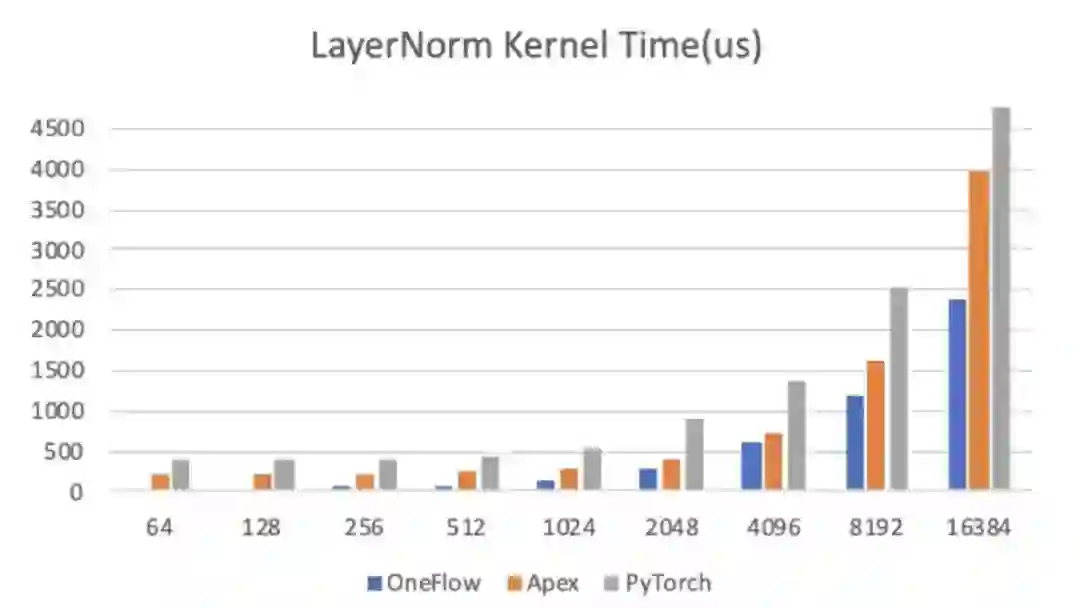
可以看到,在各组对比实验中,OneFlow 的性能也是最优的。
LayerNorm 性能优化
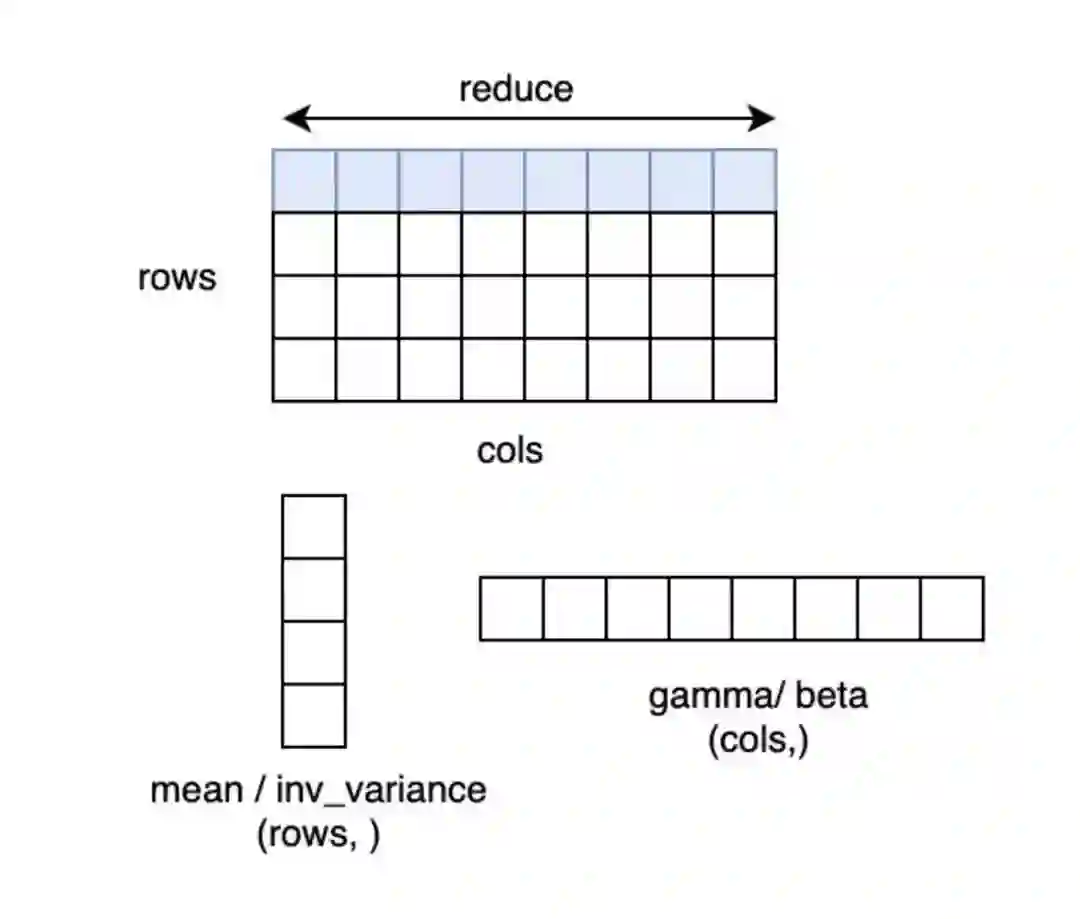
LayerNorm 是语言模型中常用的操作之一,其 CUDA Kernel 实现的高效性会影响很多网络最终的训练速度,Softmax 的优化方法也适用于 LayerNorm,LayerNorm 的数据也可以表示为 (num_rows, num_cols),计算过程中对每一行的元素做 Reduce 操作求均值方差。因此我们使用了和 Softmax 同样的优化方法来优化 LayerNorm 操作,本文以 LayerNorm 前向计算为例进行介绍。
LayerNorm 计算方法
以 PyTorch 为例,LayerNorm 的接口为:
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
其中 input 形状为:[∗, normalized\_shape\[0\], normalized\_shape\[1\], …,normalized\_shape\[−1\]\]
第一个参数 normalized\_shape只能是输入 x\_shape 的后几维,例如 x\_shape 为 (N, C, H, W\),normalized\_shape 可以是 \(W\), \(H, W\) ,\(C, H, W\) 或 \(N, C, H, W\)。输入 x 在 normalized\_shape 这几维上求均值和方差。
第三个参数 elementwise\_affine 代表是否要对 normalize 的结果做变换,即 normalize 的结果乘 gamma,加 beta。若 elementwise\_affine=True,就多了两个模型参数 gamma 和beta,形状为 normalized\_shape。
例如对于输入 x 形状为 \(N, C, H, W\), normalized\_shape为 (H, W\) 的情况,可以理解为输入 x 为 \(N\*C, H\*W\),在 N\*C 个行上,每行有 H\*W 个元素,对每行的元素求均值和方差,得到 N\*C 个 mean 和 inv\_variance,再对输入按如下 LayerNorm 的计算公式计算得到 y。若 elementwise\_affine=Tru,则有 H\*W 个 gamma 和 beta,对每行 H\*W 个的元素做变换。

LayerNorm 中求方差的方法
常见的求方差的方法有 two pass 方法、naive 方法、和 Welford 算法,本文摘录一些关键的公式和结论,详细的介绍和推导可参考:Wiki: Algorithms for calculating variance(https://en.wikipedia.org/wiki/Algorithms_for_calculating_variance) ,和 【GiantPandaCV: 用Welford算法实现LN的方差更新】— https://mp.weixin.qq.com/s?__biz=MzA4MjY4NTk0NQ==&mid=2247497854&idx=1&sn=d5811f7cfb2b8a58931dbf3222cfdf3d&scene=21#wechat_redirect
1.two-pass方法
使用的公式是:
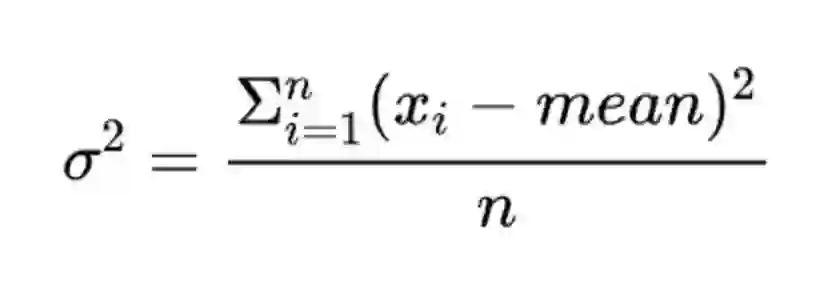
two-pass 是指这种方法需要遍历两遍数据,第一遍累加 x 得到均值,第二遍用上面公式计算得到方差。这种方法在 n 比较小时仍然是数值稳定的。
2.naive方法
使用的公式是:
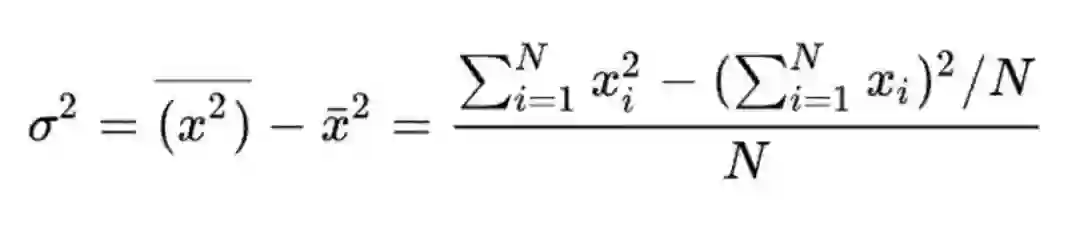
这种方法是一种 single pass 方法,在计算方差时只需要遍历一遍数据累加 x 的平方及累加 x,最后按上述公式计算得到方差。这种方法只需要遍历一遍数据,相比 two-pass 的算法,更容易达到好的性能,但是上面的 Wiki 参考链接中介绍由于 SumSquare 和 (Sum×Sum)/n 可能非常接近,可能会导致计算结果损失精度较大,因此这种方法不建议在实践中使用。
3.Welford 算法
使用的公式是:
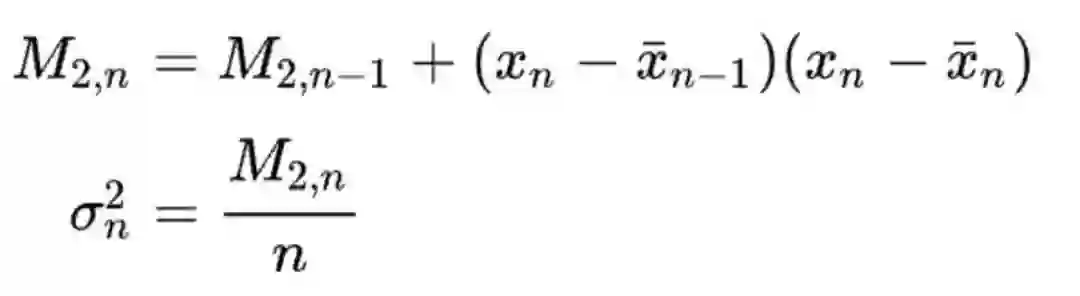
Welford 算法也是一种 single pass 方法,且数值稳定性很好,因此现在很多框架都采用这种方法。本文的代码中采用的也是 Welford 方法。
OneFlow 深度优化 LayerNorm CUDA Kernel 的技巧
和 Softmax 一样,LayerNorm 也采用分段函数优化,对于不同的 num\_cols 范围,采用不同的实现,以在各种情况下都能达到较高的有效带宽。
在每种实现中都采用了一个公共的优化:向量化访存,NVIDIA 性能优化的博客 Increase Performance with Vectorized Memory Access 中提到可以通过向量化内存操作来提高 CUDA Kernel 性能,很多 CUDA Kernel 都是带宽受限的,使用向量化内存操作可以减少总的指令数,减少延迟,提高带宽利用率。
理论上来说,在计算 LayerNorm 的过程中,输入 x 需要被读两次,第一次用于计算均值和方差。第二次用于得到均值和方差后的计算过程。而对 Global Memory 的访问操作是昂贵的,如果能将输入 x 先存起来,不重复读,就可以提升性能。在 GPU 中将输入x存起来可以使用寄存器或 Shared memory,但是寄存器资源和 Shared memory 资源都是有限的,如果 num\_cols 过大,就会超出资源的使用限制,因此我们针对不同 num\_cols 采用不同的实现,下面分别进行介绍:
1.num_cols <= 1024 的情况
针对 num\_cols \<= 1024 的情况,以 Warp 为单位处理一行或两行,将输入 x 存储到寄存器中。
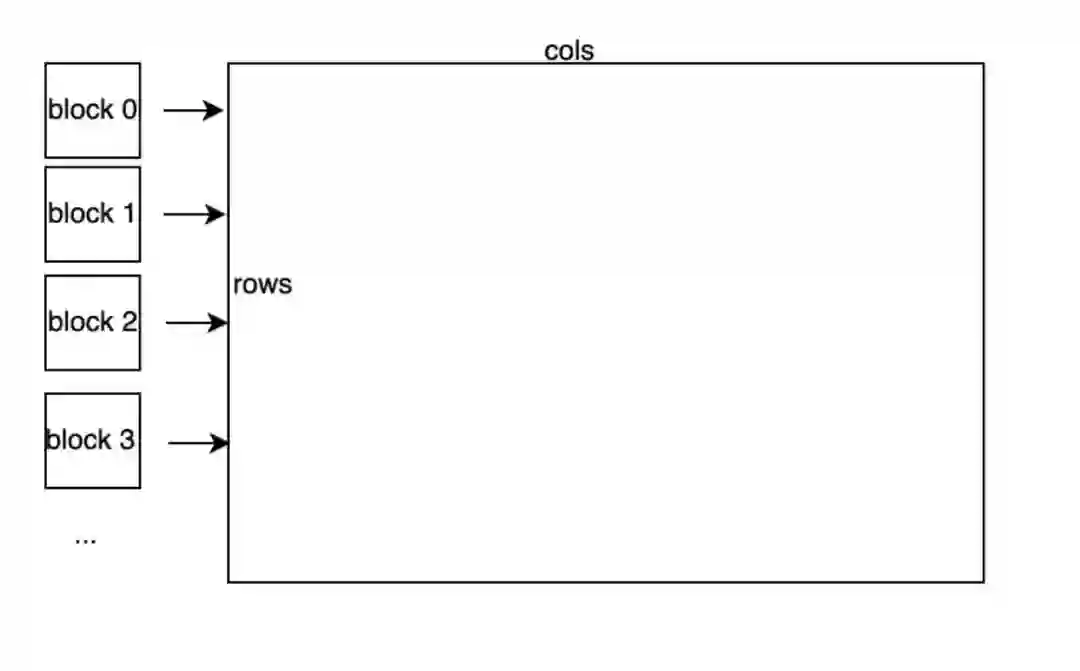
硬件上并行执行的32个线程称之为一个 Warp,同一个 Warp 的32个 thread 执行同一条指令, Warp是 GPU 调度执行的基本单元。线程块和元素的对应关系如上图所示,每个 Warp 的 threads 处理一行元素,每个 block 有 block\_size / warp\_size个 Warp,每个 block 处理 block\_size / warp\_size 行元素。
具体的处理流程是,如下图所示,每行有 num\_cols 个元素,每个 warp 处理一行,因此每个线程需要处理 num\_cols / warp\_size 个元素,每个线程读取自己需要处理的元素存储到寄存器中,并用 Welford 算法计算好均值和方差后,Warp 中的所有线程执行一次 WelfordWarpAllReduce,这样每个线程上就得到了正确的均值和方差参与后续计算。
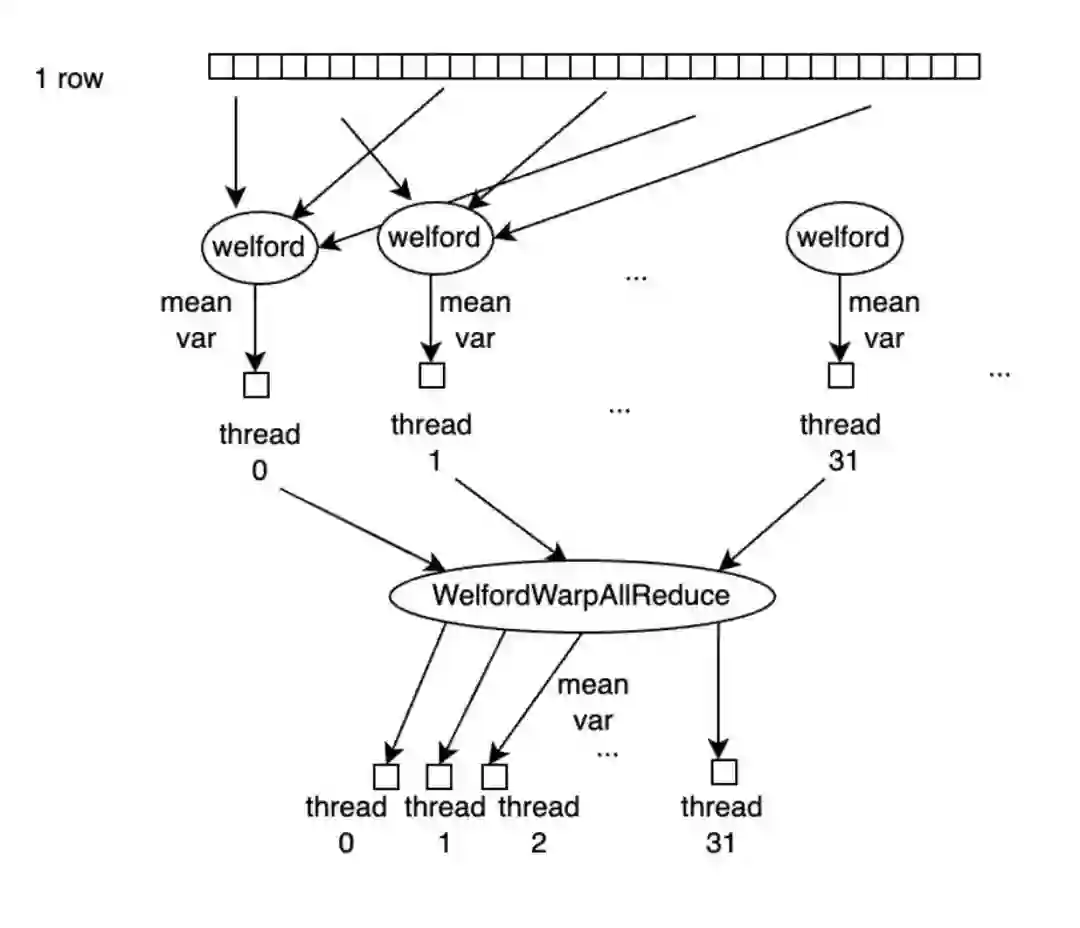
WelfordWarpAllReduce 由 WelfordWarpReduce 和 Broadcast 操作完成,WelfordWarpReduce 借助 Warp 级别同步原语_\_shfl\_down\_sync 实现,Broadcast操作借助 _\_shfl\_sync 实现,代码如下:
template<typename T, int thread_group_width = kWarpSize>
__inline__ __device__ void WelfordWarpReduce(T thread_mean, T thread_m2, T thread_count, T* mean,
T* m2, T* count) {
*mean = thread_mean;
*m2 = thread_m2;
*count = thread_count;
for (int mask = thread_group_width / 2; mask > 0; mask /= 2) {
T b_mean = __shfl_down_sync(0xffffffff, *mean, mask);
T b_m2 = __shfl_down_sync(0xffffffff, *m2, mask);
T b_count = __shfl_down_sync(0xffffffff, *count, mask);
WelfordCombine(b_mean, b_m2, b_count, mean, m2, count);
}
}
template<typename T, int thread_group_width = kWarpSize>
__inline__ __device__ void WelfordWarpAllReduce(T thread_mean, T thread_m2, T thread_count, T* mean,
T* m2, T* count) {
WelfordWarpReduce<T, thread_group_width>(thread_mean, thread_m2, thread_count, mean, m2, count);
*mean = __shfl_sync(0xffffffff, *mean, 0, thread_group_width);
*m2 = __shfl_sync(0xffffffff, *m2, 0, thread_group_width);
*count = __shfl_sync(0xffffffff, *count, 0, thread_group_width);
在这里有个模板参数 thread\_group\_width,当 num\_cols > pack\_size \* WarpSize 时,``thread_group_width为WarpSize。当num_cols太小,即num_cols<pack_size * WarpSize时,一个 Warp 内的线程不是全部处理有效的值,此时我们采用更小的thread_group_width,取值可能是16、8、4、2、1,由num_cols` 决定,并且每个线程处理两行增加并行度。
此外,在读写输入输出时,我们采用向量化访存的优化,在满足条件时,将 pack_size 个元素 pack 成更大的数据类型读入,下图为 pack_size=2 时的示意图,每个线程以更大的数据类型读入元素,可以更好的利用显存带宽。
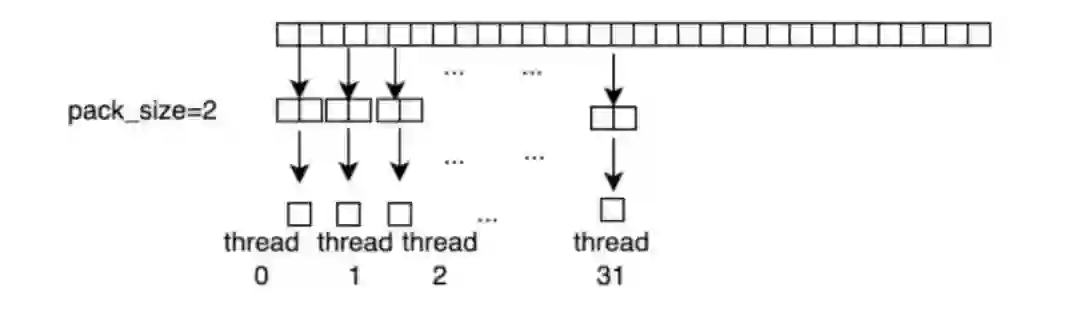
将 pack\_size 个元素 pack 成更大的数据类型读入,但是 x 还要参与计算。因此我们定义一个union 结构的 Pack 类型,storage 用于从 Global Memory中读写,做计算时用 elem\[i\]取每个元素参与计算,Pack 类型定义如下:
template\<typename T, int N>
union Pack \{
PackType\<T, N> storage;
T elem\[N\];
\};
LayerNormWarpImpl Kernel 代码如下:
template<typename LOAD, typename STORE, typename ComputeType, int pack_size, int cols_per_thread,
int thread_group_width, int rows_per_access, bool padding>
__global__ void LayerNormWarpImpl(LOAD load, STORE store, const int64_t rows, const int64_t cols,
const double epsilon, ComputeType* mean,
ComputeType* inv_variance) {
static_assert(cols_per_thread % pack_size == 0, "");
static_assert(thread_group_width <= kWarpSize, "");
static_assert(kWarpSize % thread_group_width == 0, "");
constexpr int num_packs = cols_per_thread / pack_size;
assert(cols <= cols_per_thread * thread_group_width);
ComputeType buf[rows_per_access][cols_per_thread];
const int64_t global_thread_group_id = blockIdx.x * blockDim.y + threadIdx.y;
const int64_t num_global_thread_group = gridDim.x * blockDim.y;
const int64_t lane_id = threadIdx.x;
for (int64_t row = global_thread_group_id * rows_per_access; row < rows;
row += num_global_thread_group * rows_per_access) {
ComputeType thread_mean[rows_per_access];
ComputeType thread_m2[rows_per_access];
ComputeType thread_count[rows_per_access];
#pragma unroll
for (int row_id = 0; row_id < rows_per_access; ++row_id) {
thread_mean[row_id] = 0;
thread_m2[row_id] = 0;
thread_count[row_id] = 0;
ComputeType* row_buf = buf[row_id];
#pragma unroll
for (int pack_id = 0; pack_id < num_packs; ++pack_id) {
const int col = (pack_id * thread_group_width + lane_id) * pack_size;
const int pack_offset = pack_id * pack_size;
if (!padding || col < cols) {
load.template load<pack_size>(row_buf + pack_offset, row + row_id, col);
#pragma unroll
for (int i = 0; i < pack_size; ++i) {
WelfordCombine(row_buf[pack_offset + i], thread_mean + row_id, thread_m2 + row_id,
thread_count + row_id);
}
} else {
#pragma unroll
for (int i = 0; i < pack_size; ++i) { row_buf[pack_offset + i] = 0; }
}
}
}
ComputeType warp_mean[rows_per_access];
ComputeType warp_m2[rows_per_access];
ComputeType warp_count[rows_per_access];
#pragma unroll
for (int row_id = 0; row_id < rows_per_access; ++row_id) {
int global_row_id = row + row_id;
ComputeType* row_buf = buf[row_id];
WelfordWarpAllReduce<ComputeType, thread_group_width>(
thread_mean[row_id], thread_m2[row_id], thread_count[row_id], warp_mean + row_id,
warp_m2 + row_id, warp_count + row_id);
ComputeType row_mean = warp_mean[row_id];
ComputeType row_variance =
max(Div(warp_m2[row_id], warp_count[row_id]), static_cast<ComputeType>(0.0));
ComputeType row_inv_var = Rsqrt(row_variance + static_cast<ComputeType>(epsilon));
if (lane_id == 0) {
mean[global_row_id] = row_mean;
inv_variance[global_row_id] = row_inv_var;
}
#pragma unroll
for (int i = 0; i < cols_per_thread; ++i) {
row_buf[i] = (row_buf[i] - row_mean) * row_inv_var;
}
#pragma unroll
for (int i = 0; i < num_packs; ++i) {
const int col = (i * thread_group_width + lane_id) * pack_size;
if (!padding || col < cols) {
store.template store<pack_size>(row_buf + i * pack_size, global_row_id, col);
}
}
}
}
}
LayerNormWarpImpl 的实现的模板参数的意义分别如下:
-
LOAD、STORE 分别代表输入输出,使用 load.template load\<pack\_size>\(ptr ,row\_id,col\_id\); 和store.template store\<pack\_size>\(ptr, row\_id, col\_id\); 进行读取和写入。使用LOAD和STORE有两个好处:a) 可以在 CUDA Kernel中只关心计算类型ComputeType,而不用关心具体的数据类型 T。b) 只需要加几行代码就可以快速支持 LayerNorm 和其他 Kernel Fuse,减少带宽需求,提升整体性能。 -
ComputeType代表计算类型。pack\_size代表向量化访存操作的 pack 元素的个数,我们将几个元素 pack 起来读写,提升带宽利用率。 -
cols\_per\_thread代表每个线程处理的元素个数。 -
thread\_group\_width代表处理元素的线程组的宽度,当cols > pack\_size \* warp\_size时,thread\_group\_width就是warp_size,即32。当cols \< pack\_size \* warp\_size时,就根据 cols 大小用 1/2个warp 或 1/4个warp 来处理每行的元素。采用更小的thread\_group\_width后,WarpAllReduce需要执行的轮次也相应减少。 -
rows\_per\_access代表每个 thread_group 一次处理的行数,当cols较小且thread\_group\_width小于warp_size时,若 rows 能被2整除,我们就让每个线程处理2行来增加指令并行度,从而提升性能。 -
padding代表当前是否做了 padding,若cols不是warp\_size的整数倍,我们会把它 padding 到最近的整数倍处理。
2.num\_cols > 1024 的情况
针对 num\_cols > 1024 ,以 block 为单位处理一行,利用 Shared Memory 存储输入数据对于 num\_cols > 1024 的情况,每个 block 处理一行元素,将输入 x 存储到 Shared Memory中。
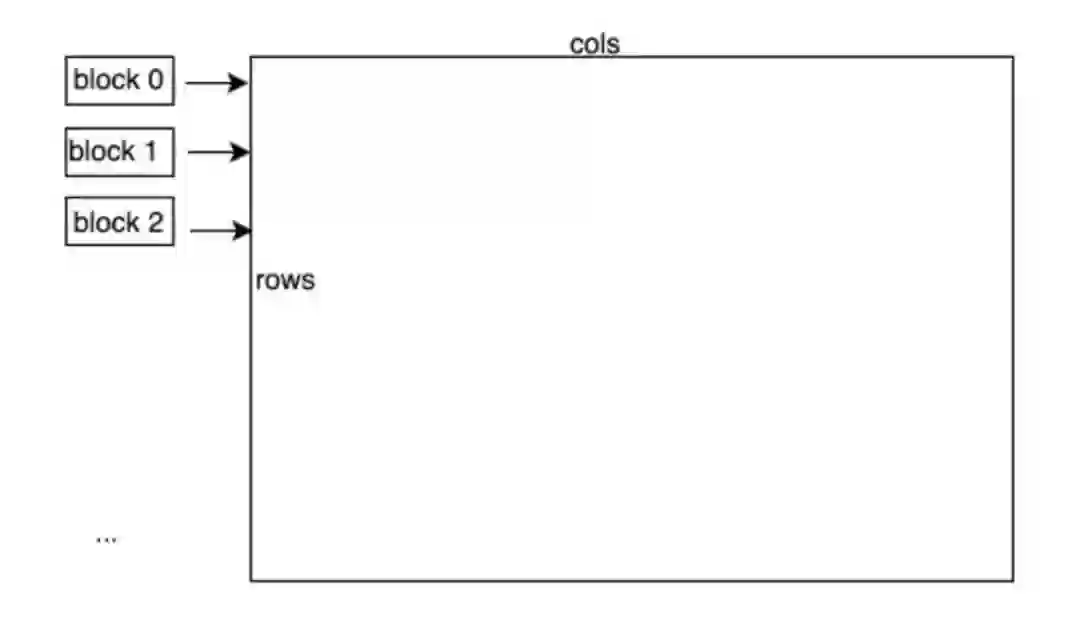
具体的处理流程是,如下图所示,每行有 num\_cols 个元素,每个 block 处理一行,因此每个线程需要处理 num\_cols / block\_size 个元素,每个线程读取自己需要处理的元素存储到 Shared Memory 中,并用 Welford 算法计算好均值和方差后,block 中的所有线程执行一次WelfordBlockAllReduce,这样每个线程上就得到了正确的均值和方差参与后续计算。
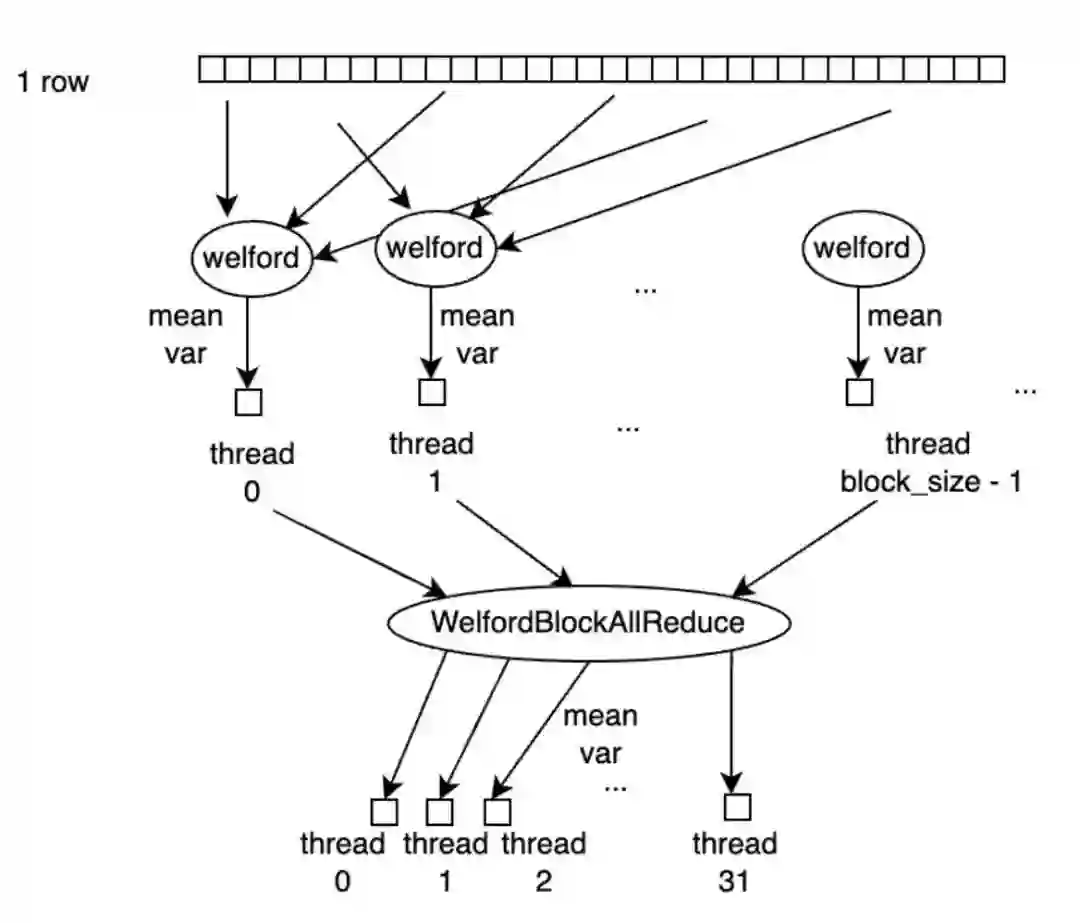
WelfordBlockAllReduce 是借助 WelfordWarpReduce 操作完成的,具体逻辑是,一个 Block 中最多有32个 Warp,对所有的 Warp 先执行一次 WelfordWarpReduce,执行完后,每个 warp 中的第一个线程,即 lane\_id=0 的线程上得到当前 WelfordWarpReduce 的结果,再将每个 Warp 的第一个线程的结果拷贝到一块 Shared Memory buffer 中,再用第一个 Warp 的32个线程执行一次 WelfordWarpReduce,此时第一个 Warp 中的 lane\_id=0 的线程上得到的就是 block 中所有线程reduce 的结果。再借助 Shared Memory,将该结果 broadcast 到 block 中的所有线程上,即完成了 WelfordBlockAllReduce 的操作。
值得注意的是,GPU 上 Shared Memory 资源同样有限,当 num\_cols 超过一定范围时需要占用的Shared Memory 可能就超出了最大限制,Kernel 就无法启动起来。
因此,我们采用 cudaOccupancyMaxActiveBlocksPerMultiprocessor 函数判断当前硬件资源条件下 Kernel 是否能成功启动,仅在返回值大于0时采用这种方案。
此外,由于 Block 内线程要做同步,当 SM 中正在调度执行的一个 Block 到达同步点时,SM 内可执行 Warp 逐渐减少,若同时执行的 Block 只有一个,则 SM 中可同时执行的 Warp 会在此时逐渐降成0,会导致计算资源空闲,造成浪费,若此时同时有其他 Block 在执行,则在一个 Block 到达同步点时仍然有其他 Block 可以执行。
当 block\_size 越小时,SM 可同时调度的 Block 越多,因此在这种情况下 block\_size 越小越好。但是当在调大 block\_size,SM 能同时调度的 Block 数不变的情况下,block_size 应该是越大越好,越大就有越好的并行度。因此代码中在选择 block_size 时,对不同 block\_size 都计算了 cudaOccupancyMaxActiveBlocksPerMultiprocessor,若结果相同,使用较大的 block\_size。
LayerNormBlockSMemImpl Kernel的代码如下:
template\<typename LOAD, typename STORE, typename ComputeType, int pack\_size, int block\_size>
\_\_global\_\_ void LayerNormBlockSMemImpl\(LOAD load, STORE store, const int64\_t rows,
const int64\_t cols, const double epsilon, ComputeType\* mean,
ComputeType\* inv\_variance\) \{
extern \_\_shared\_\_ \_\_align\_\_\(sizeof\(double\)\) unsigned char shared\_buf\[\];
auto\* buf = reinterpret\_cast\<ComputeType\*>\(shared\_buf\);
const int tid = threadIdx.x;
assert\(cols \% pack\_size == 0\);
const int num\_packs = cols / pack\_size;
for \(int64\_t row = blockIdx.x; row \< rows; row += gridDim.x\) \{
ComputeType thread\_mean = 0;
ComputeType thread\_m2 = 0;
ComputeType thread\_count = 0;
for \(int pack\_id = tid; pack\_id \< num\_packs; pack\_id += block\_size\) \{
ComputeType pack\[pack\_size\];
load.template load\<pack\_size>\(pack, row, pack\_id \* pack\_size\);
#pragma unroll
for \(int i = 0; i \< pack\_size; ++i\) \{
buf\[i \* num\_packs + pack\_id\] = pack\[i\];
WelfordCombine\(pack\[i\], \&thread\_mean, \&thread\_m2, \&thread\_count\);
\}
\}
ComputeType row\_mean = 0;
ComputeType row\_m2 = 0;
ComputeType row\_count = 0;
WelfordBlockAllReduce\<ComputeType>\(thread\_mean, thread\_m2, thread\_count, \&row\_mean, \&row\_m2,
\&row\_count\);
ComputeType row\_variance = max\(Div\(row\_m2, row\_count\), static\_cast\<ComputeType>\(0.0\)\);
ComputeType row\_inv\_var = Rsqrt\(row\_variance + static\_cast\<ComputeType>\(epsilon\)\);
if \(threadIdx.x == 0\) \{
mean\[row\] = row\_mean;
inv\_variance\[row\] = row\_inv\_var;
\}
for \(int pack\_id = tid; pack\_id \< num\_packs; pack\_id += block\_size\) \{
ComputeType pack\[pack\_size\];
#pragma unroll
for \(int i = 0; i \< pack\_size; ++i\) \{
pack\[i\] = \(buf\[i \* num\_packs + pack\_id\] \- row\_mean\) \* row\_inv\_var;
\}
store.template store\<pack\_size>\(pack, row, pack\_id \* pack\_size\);
\}
\}
\}
3.num_cols 较大时,不使用 Shared Memory 的情
当 num\_cols 较大,当前硬件资源条件下使用Shared Memory的方法无法成功Launch Kernel时,使用这种实现:一个 Block 处理一行的元素,不使用 Shared Memory,重复读输入 x。
这种方法和前面第二种情况线程和元素对应关系一致,唯一的区别在于,第二种方法将输入 x 存储到Shared Memory 中,本方法不存储 x,在每次计算时需要再从 Global Memory 中读入x。这种方法虽然需要多读一份 x,但是在实际执行时,部分输入可以被 Cache 缓存起来,不会实际增加很多时间。值得注意的是,在这种实现中,block\_size 越大,SM 中能同时并行执行的 block 数就越少,对 Cache 的需求就越少,就有更多机会命中 Cache,因此我们使用较大的 block\_size。
LayerNormBlockUncachedImpl 代码如下:
template\<typename LOAD, typename STORE, typename ComputeType, int pack\_size, int block\_size>
\_\_global\_\_ void LayerNormBlockUncachedImpl\(LOAD load, STORE store, const int64\_t rows,
const int64\_t cols, const double epsilon,
ComputeType\* mean, ComputeType\* inv\_variance\) \{
const int tid = threadIdx.x;
assert\(cols \% pack\_size == 0\);
const int num\_packs = cols / pack\_size;
for \(int64\_t row = blockIdx.x; row \< rows; row += gridDim.x\) \{
ComputeType thread\_mean = 0;
ComputeType thread\_m2 = 0;
ComputeType thread\_count = 0;
for \(int pack\_id = tid; pack\_id \< num\_packs; pack\_id += block\_size\) \{
ComputeType pack\[pack\_size\];
load.template load\<pack\_size>\(pack, row, pack\_id \* pack\_size\);
#pragma unroll
for \(int i = 0; i \< pack\_size; ++i\) \{
WelfordCombine\(pack\[i\], \&thread\_mean, \&thread\_m2, \&thread\_count\);
\}
\}
ComputeType row\_mean = 0;
ComputeType row\_m2 = 0;
ComputeType row\_count = 0;
WelfordBlockAllReduce\<ComputeType>\(thread\_mean, thread\_m2, thread\_count, \&row\_mean, \&row\_m2,
\&row\_count\);
ComputeType row\_variance = max\(Div\(row\_m2, row\_count\), static\_cast\<ComputeType>\(0.0\)\);
ComputeType row\_inv\_var = Rsqrt\(row\_variance + static\_cast\<ComputeType>\(epsilon\)\);
if \(threadIdx.x == 0\) \{
mean\[row\] = row\_mean;
inv\_variance\[row\] = row\_inv\_var;
\}
for \(int pack\_id = tid; pack\_id \< num\_packs; pack\_id += block\_size\) \{
ComputeType pack\[pack\_size\];
const int pack\_offset = pack\_id \* pack\_size;
load.template load\<pack\_size>\(pack, row, pack\_offset\);
#pragma unroll
for \(int i = 0; i \< pack\_size; ++i\) \{ pack\[i\] = \(pack\[i\] \- row\_mean\) \* row\_inv\_var; \}
store.template store\<pack\_size>\(pack, row, pack\_offset\);
\}
\}
\}
3 OneFlow Softmax 库
经过反复迭代,OneFlow 的 Softmax 的接口和实现已经成熟,趋于稳定,所以 OneFlow 团队把它解耦后,作为独立的接口提供,优化代码放在 https://github.com/Oneflow-Inc/oneflow/blob/master/oneflow/core/cuda/softmax.cuh_ ,它可以脱离 OneFlow 代码独立编译。
在你的项目中 include 这个头文件后,就可以直接使用。比如,使用以下几行代码就可以实现一个 Softmax GPU Kernel。
oneflow::cuda::softmax::DirectLoad\<half, float\> load\(in, cols\);
oneflow::cuda::softmax::DirectStore\<float, half> store\(out, cols\);
oneflow::cuda::softmax::DispatchSoftmax\<decltype\(load\), decltype\(store\), float\>\(
cuda\_stream, load, store, rows, cols\);
如果要实现一个 LogSoftmax Kernel 也很简单:只需要将以上代码中的的 DispatchSoftmax 换成DispatchLogSoftmax 就可以了。
与其它地方提供的 Softmax 相比,OneFlow Softmax 的主要优势有:
-
性能优势。最近一年进一步优化了小的 num_cols 下的性能。
-
同时支持了 Softmax 和 LogSoftmax,适用场景更广。
-
输入输出通过 Load/Store 结构传递,解耦数据IO和计算,只需要加几行代码就可以快速支持 Softmax 和其他 Kernel Fuse,减少带宽需求,带来很高的性能收益。
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“transformer”获取最新Transformer综述论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~



