RealNVP与Glow:流模型的传承与升华

作者丨苏剑林
单位丨广州火焰信息科技有限公司
研究方向丨NLP,神经网络
个人主页丨kexue.fm
话在开头
在上一篇文章细水长flow之NICE:流模型的基本概念与实现中,我们介绍了 flow 模型中的一个开山之作:NICE 模型。从 NICE 模型中,我们能知道 flow 模型的基本概念和基本思想,最后笔者还给出了 Keras 中的 NICE 实现。
本文我们来关心 NICE 的升级版:RealNVP 和 Glow。
Glow 模型的采样演示:
精巧的flow
不得不说,flow 模型是一个在设计上非常精巧的模型。总的来看,flow 就是想办法得到一个 encoder 将输入 x 编码为隐变量 z,并且使得 z 服从标准正态分布。得益于 flow 模型的精巧设计,这个 encoder 是可逆的,从而我们可以立马从 encoder 写出相应的 decoder(生成器)出来,因此,只要 encoder 训练完成,我们就能同时得到 decoder,完成生成模型的构建。
为了完成这个构思,不仅仅要使得模型可逆,还要使得对应的雅可比行列式容易计算,为此,NICE 提出了加性耦合层,通过多个加性耦合层的堆叠,使得模型既具有强大的拟合能力,又具有单位雅可比行列式。就这样,一种不同于 VAE 和 GAN 的生成模型——flow 模型就这样出来了,它通过巧妙的构造,让我们能直接去拟合概率分布本身。
待探索的空间
NICE 提供了 flow 模型这样一种新的思路,并完成了简单的实验,但它同时也留下了更多的未知的空间。flow 模型构思巧妙,相比之下,NICE 的实验则显得过于粗糙:只是简单地堆叠了全连接层,并没有给出诸如卷积层的用法,论文虽然做了多个实验,但事实上真正成功的实验只有 MNIST,说服力不够。
因此,flow 模型还需要进一步挖掘,才能在生成模型领域更加出众。这些拓展,由它的“继承者”RealNVP 和 Glow 模型完成了,可以说,它们的工作使得 flow 模型大放异彩,成为生成模型领域的佼佼者。
RealNVP
这部分我们来介绍 RealNVP 模型,它是 NICE 的改进,来自论文 Density estimation using Real NVP [1]。它一般化了耦合层,并成功地在耦合模型中引入了卷积层,使得可以更好地处理图像问题。更进一步地,它还提出了多尺度层的设计,这能够降低计算量,通过还提供了强大的正则效果,使得生成质量得到提升。至此,flow 模型的一般框架开始形成。
后面的 Glow 模型基本上沿用了 RealNVP 的框架,只是对部分内容进行了修改(比如引入了可逆 1x1 卷积来代替排序层)。不过值得一提的是,Glow 简化了 RealNVP 的结构,表明 RealNVP 中某些比较复杂的设计是没有必要的。因此本文在介绍 RealNVP 和 Glow 时,并没有严格区分它们,而只是突出它们的主要贡献。
仿射耦合层
其实 NICE 和 RealNVP 的第一作者都是 Laurent Dinh,他是 Bengio 的博士生,他对 flow 模型的追求和完善十分让我钦佩。在第一篇 NICE 中,他提出了加性耦合层,事实上也提到了乘性耦合层,只不过没有用上;而在 RealNVP 中,加性和乘性耦合层结合在一起,成为一个一般的“仿射耦合层”。

这里的 s,t 都是 x1 的向量函数,形式上第二个式子对应于 x2 的一个仿射变换,因此称为“仿射耦合层”。
仿射耦合的雅可比矩阵依然是一个三角阵,但对角线不全为 1,用分块矩阵表示为:

很明显,它的行列式就是 s 各个元素之积。为了保证可逆性,一般我们约束 s 各个元素均大于零,所以一般情况下,我们都是直接用神经网络建模输出 log s,然后取指数形式
注:从仿射层大概就可以知道 RealNVP 的名称来源了,它的全称为“real-valued non-volume preserving”,强行翻译为“实值非体积保持”。相对于加性耦合层的行列式为 1,RealNVP 的雅可比行列式不再恒等于 1,而我们知道行列式的几何意义就是体积(请参考《新理解矩阵5:体积=行列式》[2]),所以行列式等于 1 就意味着体积没有变化,而仿射耦合层的行列式不等于 1 就意味着体积有所变化,所谓“非体积保持”。
随机打乱维度
在 NICE 中,作者通过交错的方式来混合信息流(这也理论等价于直接反转原来的向量),如下图(对应地,这里已经换为本文的仿射耦合层图示):
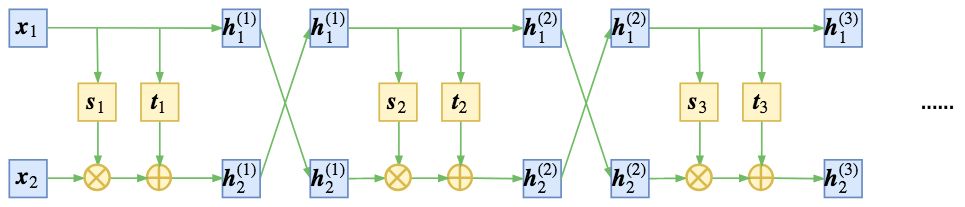
▲ NICE通过交叉耦合,充分混合信息
而 RealNVP 发现,通过随机的方式将向量打乱,可以使信息混合得更加充分,最终的 loss 可以更低,如图:
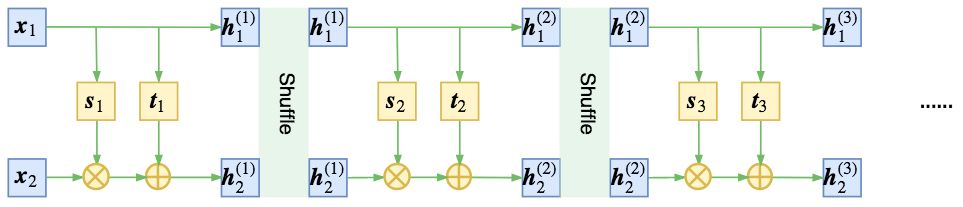
▲ RealNVP通过随机打乱每一步输出的整个向量,使得信息混合得更充分均匀
这里的随机打乱,就是指将每一步 flow 输出的两个向量 h1,h2 拼接成一个向量 h,然后将这个向量重新随机排序。
引入卷积层
RealNVP 中给出了在 flow 模型中合理使用卷积神经网络的方案,这使得我们可以更好地处理图像问题,并且减少参数量,还可以更充分发挥模型的并行性能。
注意,不是任意情况下套用卷积都是合理的,用卷积的前提是输入(在空间维度)具有局部相关性。图像本身是具有局部相关性的,因为相邻之间的像素是有一定关联的,因此一般的图像模型都可以使用卷积。
但是我们注意 flow 中的两个操作:
1. 将输入分割为两部分 x1,x2,然后输入到耦合层中,而模型 s,t 事实上只对 x1 进行处理;
2. 特征输入耦合层之前,要随机打乱原来特征的各个维度(相当于乱序的特征)。这两个操作都会破坏局部相关性,比如分割操作有可能割裂原来相邻的像素,随机打乱也可能将原来相邻的两个像素分割得很远。
所以,如果还要坚持使用卷积,就要想办法保留这种空间的局部相关性。我们知道,一幅图像有三个轴:高度(height)、宽度(width)、通道(channel),前两个属于空间轴,显然具有局部相关性,因此能“搞”的就只有“通道”轴。
为此,RealNVP 约定分割和打乱操作,都只对“通道”轴执行。也就是说,沿着通道将输入分割为 x1,x2 后,x1 还是具有局部相关性的,还有沿着通道按着同一方式打乱整体后,空间部分的相关性依然得到保留,因此在模型 s,t 中就可以使用卷积了。
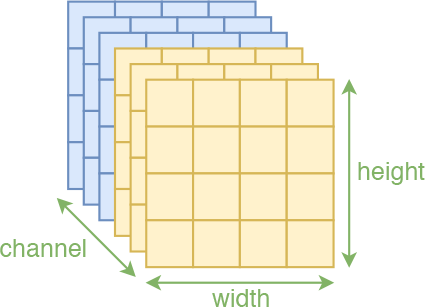
▲ 沿着通道轴进行分割,不损失空间上的局部相关性
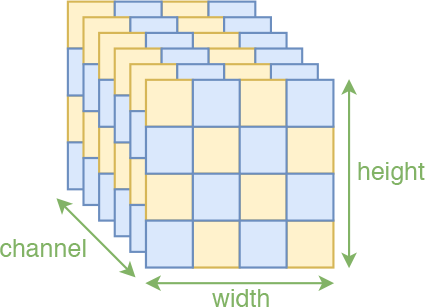
▲ 沿着空间轴交错(棋盘)分割,也是一种保持空间局部相关性的方案
注:在 RealNVP 中,将输入分割为两部分的操作称为 mask,因为这等价于用 0/1 来区别标注原始输入。除了前面说的通过通道轴对半分的 mask 外,RealNVP 事实上还引入了一种空间轴上的交错 mask,如上图的右边,这种 mask 称为棋盘式 mask(格式像国际象棋的棋盘)。
这种特殊的分割也保留了空间局部相关性,原论文中是两种 mask 方式交替使用的,但这种棋盘式 mask 相对复杂,也没有什么特别明显的提升,所以在 Glow 中已经被抛弃。
不过想想就会发现有问题。一般的图像通道轴就只有三维,像 MNIST 这种灰度图还只有一维,怎么分割成两半?又怎么随机打乱?为了解决这个问题,RealNVP 引入了称为 squeeze 的操作,来让通道轴具有更高的维度。
其思想很简单:直接 reshape,但 reshape 时局部地进行。具体来说,假设原来图像为 h×w×c 大小,前两个轴是空间维度,然后沿着空间维度分为一个个 2×2×c 的块(这个 2 可以自定义),然后将每个块直接 reshape 为 1×1×4c,也就是说最后变成了 h/2×w/2×4c。
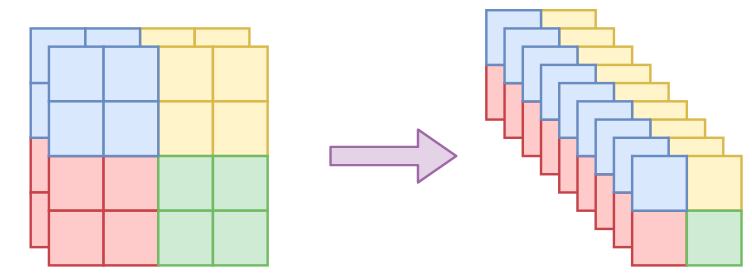
▲ squeeze操作图示,其中2x2的小区域可以换为自定义大小的区域
有了 squeeze 这个操作,我们就可以增加通道轴的维数,但依然保留局部相关性,从而我们前面说的所有事情都可以进行下去了,所以 squeeze 成为 flow 模型在图像应用中的必备操作。
多尺度结构
除了成功地引入卷积层外,RealNVP 的另一重要进展是加入了多尺度结构。跟卷积层一样,这也是一个既减少了模型复杂度、又提升了结果的策略。
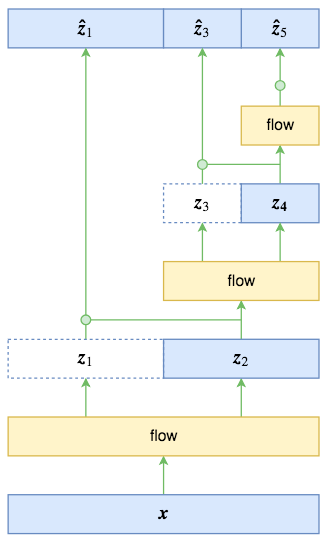
▲ RealNVP中的多尺度结构图示
多尺度结构其实并不复杂,如图所示。原始输入经过第一步 flow 运算(“flow 运算”指的是多个仿射耦合层的复合)后,输出跟输入的大小一样,这时候将输入对半分开两半 z1,z2(自然也是沿着通道轴),其中 z1 直接输出,而只将 z2 送入到下一步 flow 运算,后面的依此类推。比如图中的特例,最终的输出由 z1,z3,z5 组成,总大小跟输入一样。
多尺度结构有点“分形”的味道,原论文说它启发于 VGG。每一步的多尺度操作直接将数据尺寸减少到原来的一半,显然是非常可观的。但有一个很重要的细节,在 RealNVP 和 Glow 的论文中都没有提到,我是看了源码才明白的,那就是最终的输出 [z1,z3,z5] 的先验分布应该怎么取?按照 flow 模型的通用假设,直接设为一个标准正态分布?
事实上,作为不同位置的多尺度输出,z1,z3,z5 的地位是不对等的,而如果直接设一个总体的标准正态分布,那就是强行将它们对等起来,这是不合理的。最好的方案,应该是写出条件概率公式:

由于 z3,z5 是由 z2 完全决定的,z5 也是由 z4 完全决定的,因此条件部分可以改为:

RealNVP 和 Glow 假设右端三个概率分布都是正态分布,其中 p(z1|z2) 的均值方差由 z2 算出来(可以直接通过卷积运算,这有点像 VAE),p(z3|z4) 的均值方差由 z4 算出来,p(z5) 的均值方差直接学习出来。
显然这样的假设会比简单认为它们都是标准正态分布要有效得多。我们还可以换一种表述方法:上述的先验假设相当于做了如下的变量代换:

然后认为 [ẑ1,ẑ3,ẑ5] 服从标准正态分布。同 NICE 的尺度变换层一样,这三个变换都会导致一个非 1 的雅可比行列式,也就是要往 loss 中加入形如
乍看之下多尺度结构就是为了降低运算量,但并不是那么简单。由于 flow 模型的可逆性,输入输出维度一样,事实上这会存在非常严重的维度浪费问题,这往往要求我们需要用足够复杂的网络去缓解这个维度浪费。
多尺度结构相当于抛弃了 p(z) 是标准正态分布的直接假设,而采用了一个组合式的条件分布,这样尽管输入输出的总维度依然一样,但是不同层次的输出地位已经不对等了,模型可以通过控制每个条件分布的方差来抑制维度浪费问题(极端情况下,方差为 0,那么高斯分布坍缩为狄拉克分布,维度就降低 1),条件分布相比于独立分布具有更大的灵活性。而如果单纯从 loss 的角度看,多尺度结构为模型提供了一个强有力的正则项(相当于多层图像分类模型中的多条直连边)。
Glow
整体来看,Glow 模型在 RealNVP 的基础上引入了 1x1 可逆卷积来代替前面说的打乱通道轴的操作,并且对 RealNVP 的原始模型做了简化和规范,使得它更易于理解和使用。
■ 论文 | https://www.paperweekly.site/papers/2101
■ 博客 | https://blog.openai.com/glow/
■ 源码 | https://github.com/openai/glow
可逆1x1卷积
这部分介绍 Glow 的主要改进工作:可逆 1x1 卷积。
置换矩阵
可逆 1x1 卷积源于我们对置换操作的一般化。我们知道,在 flow 模型中,一步很重要的操作就是将各个维度重新排列,NICE 是简单反转,而 RealNVP 则是随机打乱。不管是哪一种,都对应着向量的置换操作。
事实上,对向量的置换操作,可以用矩阵乘法来描述,比如原来向量是 [1,2,3,4],分别交换第一、二和第三、四两个数,得到 [2,1,4,3],这个操作可以用矩阵乘法来描述:
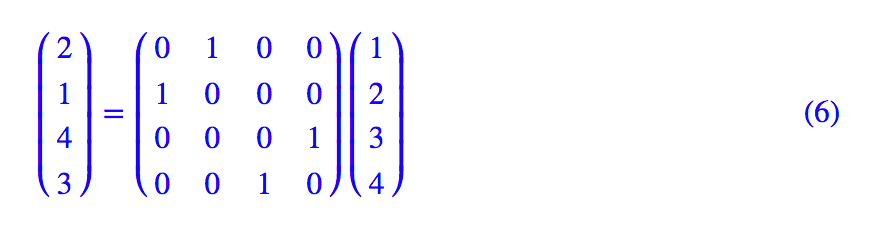
其中右端第一项是“由单位矩阵不断交换两行或两列最终得到的矩阵”称为置换矩阵。
一般化置换
既然这样,那很自然的想法就是:为什么不将置换矩阵换成一般的可训练的参数矩阵呢?所谓 1x1 可逆卷积,就是这个想法的结果。
注意,我们一开始提出 flow 模型的思路时就已经明确指出,flow 模型中的变换要满足两个条件:一是可逆,二是雅可比行列式容易计算。如果直接写出变换:

那么它就只是一个普通的没有 bias 的全连接层,并不能保证满足这两个条件。为此,我们要做一些准备工作。首先,我们让 h 和 x 的维度一样,也就是说 W 是一个方阵,这是最基本的设置;其次,由于这只是一个线性变换,因此它的雅可比矩阵就是
利用LU分解
以上做法只是一个很基本的解决方案,我们知道,算矩阵的行列式运算量特别大,还容易溢出。而 Glow 给出了一个非常巧妙的解决方案:LU 分解的逆运用。具体来说,是因为任意矩阵都可以分解为:

其中 P 是一个置换矩阵,也就是前面说的 shuffle 的等价矩阵;L 是一个下三角阵,对角线元素全为 1;U 是一个上三角阵。这种形式的分解称为 LU 分解。如果知道这种矩阵的表达形式,显然求雅可比行列式是很容易的,它等于:

也就是 U 的对角线元素的绝对值对数之和。既然任意矩阵都可以分解成 (7) 式,我们何不直接设W的形式为 (7) 式?这样一来矩阵乘法计算量并没有明显提升,但求行列式的计算量大大降低,而且计算起来也更为容易。
这就是 Glow 中给出的技巧:先随机生成一个正交矩阵,然后做 LU 分解,得到 P,L,U,固定 P,也固定 U 的对角线的正负号,然后约束 L 为对角线全 1 的下三角阵,U 为上三角阵,优化训练 L,U 的其余参数。
结果分析
上面的描述只是基于全连接的。如果用到图像中,那么就要在每个通道向量上施行同样的运算,这等价于 1x1 的卷积,这就是所谓的可逆 1x1 卷积的来源。事实上我觉得这个名字起得不大好,它本质上就是共享权重的、可逆的全连接层,单说 1x1 卷积,就把它局限在图像中了,不够一般化。
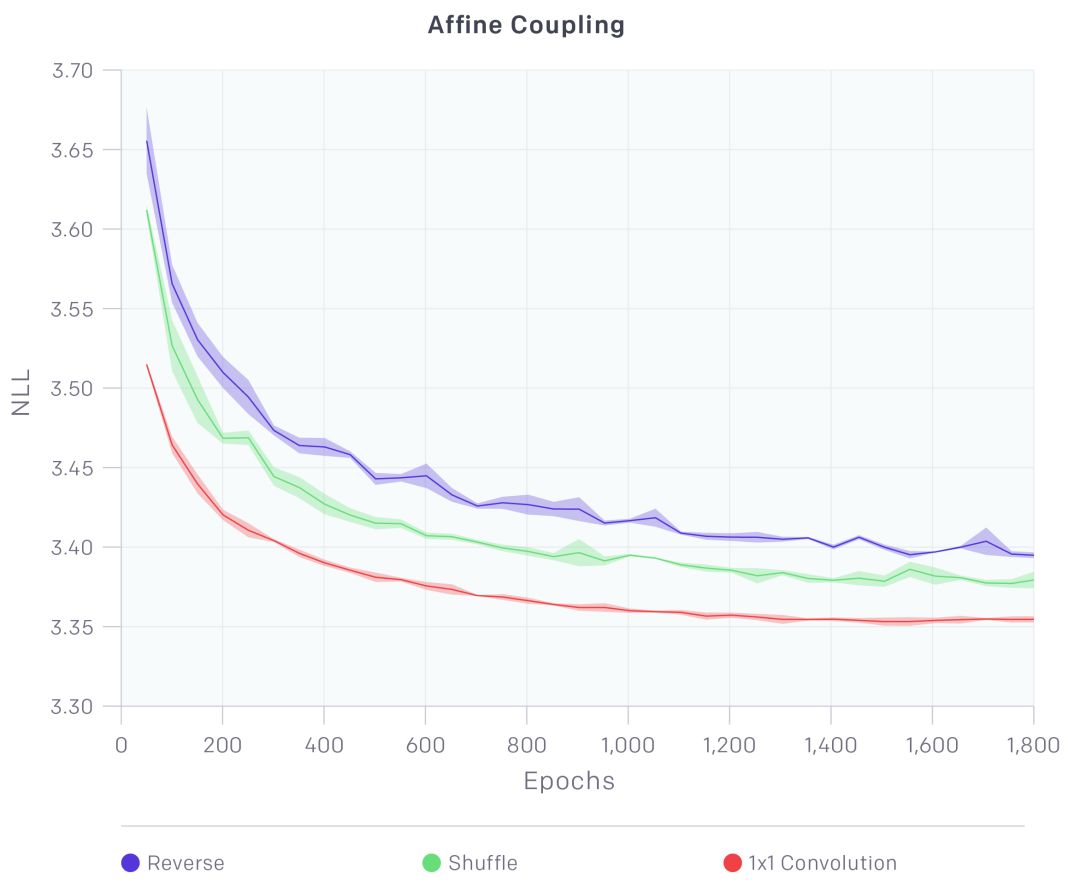
▲ 三种不同的打乱方案最终的loss曲线比较(来自OpenAI博客)
Glow 的论文做了对比实验,表明相比于直接反转,shuffle 能达到更低的 loss,而相比 shuffle,可逆 1x1 卷积能达到更低的 loss。我自己的实验也表明了这一点。
不过要指出的是:可逆 1x1 卷积虽然能降低 loss,但是有一些要注意的问题。第一,loss 的降低不代表生成质量的提高,比如 A 模型用了 shuffle,训练 200 个 epoch 训练到 loss=-50000,B 模型用了可逆卷积,训练 150 个 epoch 就训练到 loss=-55000,那么通常来说在当前情况下 B 模型的效果还不如 A(假设两者都还没有达到最优)。事实上可逆 1x1 卷积只能保证大家都训练到最优的情况下,B 模型会更优。第二,在我自己的简单实验中貌似发现,用可逆 1x1 卷积达到饱和所需要的 epoch 数,要远多于简单用 shuffle 的 epoch 数。
Actnorm
RealNVP 中用到了 BN 层,而 Glow 中提出了名为 Actnorm 的层来取代 BN。不过,所谓 Actnorm 层事实上只不过是 NICE 中的尺度变换层的一般化,也就是 (5) 式提到的缩放平移变换:

其中 μ,σ 都是训练参数。Glow 在论文中提出的创新点是用初始的 batch 的均值和方差去初始化 μ,σ 这两个参数,但事实上所提供的源码并没有做到这一点,纯粹是零初始化。
所以,这一点是需要批评的,纯粹将旧概念换了个新名字罢了。当然,批评的是 OpenAI 在 Glow 中乱造新概念,而不是这个层的效果。缩放平移的加入,确实有助于更好地训练模型。而且,由于 Actnorm 的存在,仿射耦合层的尺度变换已经显得不那么重要了。
我们看到,相比于加性耦合层,仿射耦合层多了一个尺度变换层,从而计算量翻了一倍。但事实上相比加性耦合,仿射耦合效果的提升并不高(尤其是加入了 Actnorm 后),所以要训练大型的模型,为了节省资源,一般都只用加性耦合,比如 Glow 训练 256x256 的高清人脸生成模型,就只用到了加性耦合。
源码分析
事实上 Glow 已经没有什么可以特别解读的了。但是 Glow 整体的模型比较规范,我们可以逐步分解一下 Glow 的模型结构,为我们自己搭建类似的模型提供参考。这部分内容源自我对 Glow 源码的阅读,主要以示意图的方式给出。
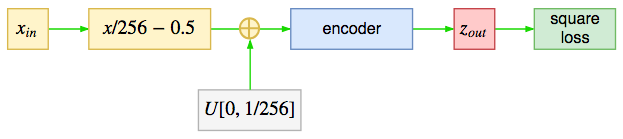
模型总图
整体来看,Glow 模型并不复杂,就是在输入加入一定量的噪声,然后输入到一个 encoder 中,最终用“输出的平均平方和”作为损失函数(可以将模型中产生的对数雅可比行列式视为正则项),注意,loss 不是“平方平均误差(MSE)”,而仅仅是输出的平方和,也就是不用减去输入。
▲ Glow模型总图
encoder
下面对总图中的 encoder 进行分解,大概流程为:
▲ encoder流程图
encoder 由 L 个模块组成,这些模块在源码中被命名为 revnet,每个模块的作用是对输入进行运算,然后将输出对半分为两份,一部分传入下一个模块,一部分直接输出,这就是前面说的多尺度结构。Glow 源码中默认 L=3,但对于 256x256 的人脸生成则用到 L=6。
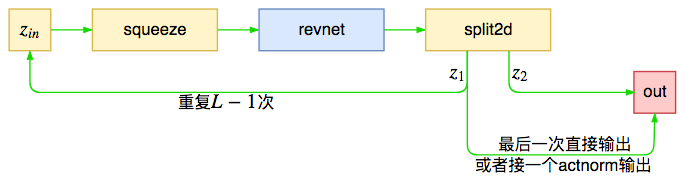
revnet
现在来进一步拆解 encoder,其中 revnet 部分为:
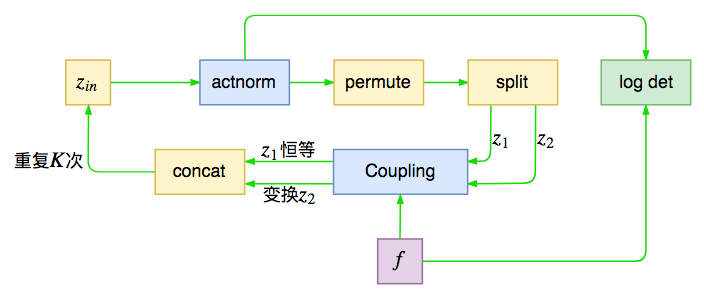
▲ revnet结构图
其实它就是前面所说的单步 flow 运算,在输入之前进行尺度变换,然后打乱轴,并且进行分割,接着输入到耦合层中。如此训练 K 次,这里的 K 称为“深度”,Glow 中默认是 32。其中 actnorm 和仿射耦合层会带来非 1 的雅可比行列式,也就是会改动 loss,在图上也已注明。
split2d
Glow 中的定义的 split2d 不是简单的分割,而是混合了对分割后的变换运算,也就是前面所提到的多尺度输出的先验分布选择。
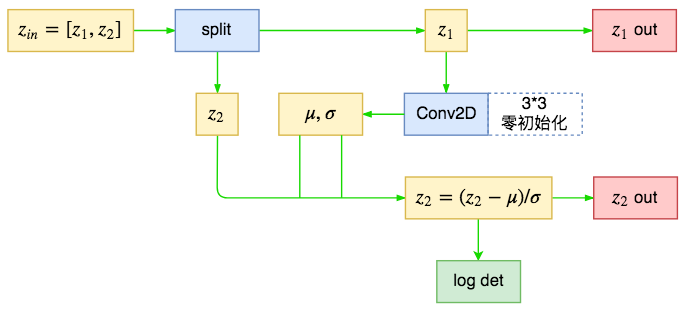
▲ glow中的split2d并不是简单的分割
对比 (5) 和 (9),我们可以发现条件先验分布与 Actnorm 的区别仅仅是缩放平移量的来源,Actnorm 的缩放平移参数是直接优化而来,而先验分布这里的缩放平移量是由另一部分通过某个模型计算而来,事实上我们可以认为这种一种条件式 Actnorm(Cond Actnorm)。
f
最后是 Glow 中的耦合层的模型(放射耦合层的 s,t),源码中直接命名为 f,它用了三层 relu 卷积:
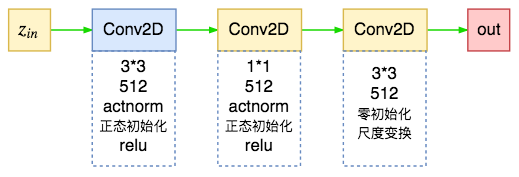
▲ glow中耦合层的变换模型
其中最后一层使用零初始化,这样就使得初始状态下输入输出一样,即初始状态为一个恒等变换,这有利于训练深层网络。
复现
可以看到 RealNVP 其实已经做好了大部分工作,而 Glow 在 RealNVP 的基础上进行去芜存菁,并加入了自己的一些小修改(1x1 可逆卷积)和规范。但不管怎么样,这是一个值得研究的模型。
Keras版本
官方开源的 Glow 是 TensorFlow 版的。这么有意思的模型,怎么能少得了 Keras 版呢,先奉上笔者实现的 Keras 版:
https://github.com/bojone/flow/blob/master/glow.py
已经 pull request 到 Keras 官方的 examples,希望过几天能在 Keras 的 github 上看到它。
由于某些函数的限制,目前只支持 TensorFlow 后端,我的测试环境包括:Keras 2.1.5 + tensorflow 1.2 和 Keras 2.2.0 + tensorflow 1.8,均在 Python 2.7 下测试。
效果测试
刚开始读到 Glow 时,我感到很兴奋,仿佛像发现了新大陆一样。经过一番学习后,我发现......Glow 确实是一块新大陆,然而却非我等平民能轻松登上的。
让我们来看 Glow 的 github 上的两个 issue:
How many epochs will be take when training celeba? [3]
The samples we show in the paper are after about 4000 training epochs...
Anyone reproduced the celeba-HQ results in the paper? [4]
Yes we trained with 40 GPU's for about a week, but samples did start to look good after a couple of days...
我们看到 256x256 的高清人脸图像生成,需要训练 4000 个 epoch,用 40 个 GPU 训练了一周,简单理解就是用 1 个 GPU 训练一年...(卒)
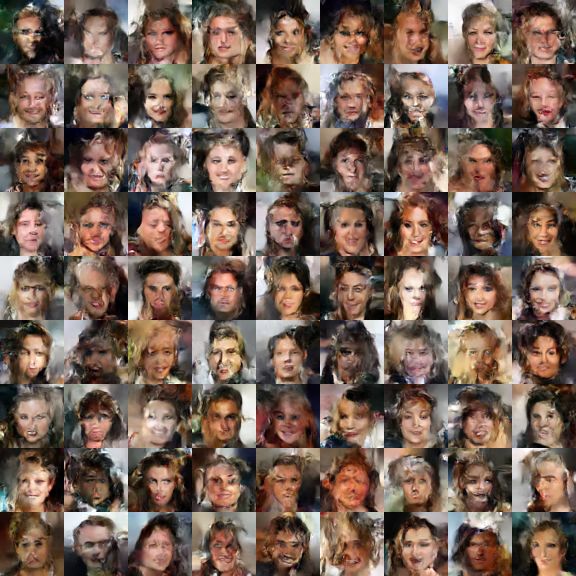
好吧,我还是放弃这可望而不可及的任务吧,我们还是简简单单玩个 64x64,不,还是 32x32 的人脸生成,做个 demo 出来就是了。

▲ 用glow模型生成的32x32人脸,150个epoch

▲ 用glow模型生成的cifar10,700个epoch
感觉还可以吧,我用的是 L=3,K=6,每个 epoch 要 70s 左右(GTX1070)。跑了 150 个 epoch,这里的 epoch 跟通常概念的 epoch 不一样,我这里的一个 epoch 就是随机抽取的 3.2 万个样本,如果每次跑完完整的 epoch,那么用时更久。同样的模型,顺手也跑了一下 cifar10,跑了 700 个 epoch,不过效果不大好。就是远看似乎还可以,近看啥都不是的那种。
当然,其实 cifar10 虽然不大(32x32),但事实上生成 cifar10 可比生成人脸难多了(不管是哪种生成模型),我们就跳过吧。话说 64x64 的人脸,我也作死地尝试了一下,这时候用了 L=3,K=10,跑了 200 个 epoch(这时候每个 epoch 要 6 分钟了)。结果..……
▲ 用glow模型生成的64x64人脸,230个epoch
人脸是人脸了,不过看上去更像妖魔脸。看来网络深度和 epoch 数都还不够,我也跑不下去了。
艰难结束
好了,对 RealNVP 和 Glow 的介绍终于可以结束了。本着对 Glow 的兴趣,利用前后两篇文章把三个 flow 模型都捋了一遍,希望对读者有帮助。
总体来看,诸如 Glow 的 flow 模型整体确实很优美,但运算量还是偏大了,训练时间过长,不像一般的 GAN 那么友好。个人认为 flow 模型要在当前以 GAN 为主的生成模型领域中站稳脚步,还有比较长的路子要走,可谓任重而道远呀。
参考文献
[1]. Dinh, L., Sohl-Dickstein, J., and Bengio, S. (2016). Density estimation using Real NVP. arXiv preprint arXiv:1605.08803.
[2]. https://kexue.fm/archives/2208
[3]. https://github.com/openai/glow/issues/14#issuecomment-406650950
[4]. https://github.com/openai/glow/issues/37#issuecomment-410019221

点击以下标题查看作者其他文章:

让你的论文被更多人看到
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢? 答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读,也可以是学习心得或技术干货。我们的目的只有一个,让知识真正流动起来。
📝 来稿标准:
• 稿件确系个人原创作品,来稿需注明作者个人信息(姓名+学校/工作单位+学历/职位+研究方向)
• 如果文章并非首发,请在投稿时提醒并附上所有已发布链接
• PaperWeekly 默认每篇文章都是首发,均会添加“原创”标志
📬 投稿邮箱:
• 投稿邮箱:hr@paperweekly.site
• 所有文章配图,请单独在附件中发送
• 请留下即时联系方式(微信或手机),以便我们在编辑发布时和作者沟通
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧
关于PaperWeekly
PaperWeekly 是一个推荐、解读、讨论、报道人工智能前沿论文成果的学术平台。如果你研究或从事 AI 领域,欢迎在公众号后台点击「交流群」,小助手将把你带入 PaperWeekly 的交流群里。

▽ 点击 | 阅读原文 | 查看作者博客


