惊呆了!双足机器人Cassie破百米吉尼斯世界纪录,用时24.73秒

新智元报道
新智元报道
【新智元导读】在完成创纪录的5公里户外马拉松后,双足机器人Cassie又以24.73秒完成了百米冲刺,创下了吉尼斯世界纪录。
刚刚,双足机器人Cassie创造了100米吉尼斯世界纪录!
用时24.73秒。

和人类运动员一样,Cassie也有自己特有的起跑姿势——让两个大汉用杆子吊着。

当然,在起跑之前,还需要小热一下身。
只见Cassie跺着小碎步,已经铆足了冲劲儿。
指令一下,直接冲了出去,朝着终点线一跃而过。
这步伐,妥妥的机器鸵鸟上线!
就是比原版的慢了那么「亿点点」……
百米冲刺跑结束后,Cassie还不忘缓缓走了几步。
要说与人类相比,Cassie的成绩依旧略显苍白。
目前,短跑运动员波尔特以9.58秒惊人的成绩保持着人类的世界纪录。

5公里慢跑,到百米冲刺
虽然与人类相比,Cassie或许还不值得一提。
但一个机器人能够以24.73秒完成百米已经是非常震撼的了——相当于以每秒4米的速度「飞奔」。
去年,Cassie在俄勒冈州立大学的校园内,完成了「一个人的户外马拉松」,成为世界上第一台跑完5公里的机器人。

用时约53分钟,同时在跑步过程中没有充过一次电。
要说与人类相比每公里10.6分钟,只是一个散步级的水平。但是同样对机器人来说,是一大进步。
Cassie 一直是机器人学习运动的开创性研究平台。在Cassie完成了耐力测试后,研究人员转而向速度提升方面探索。

要知道,完成百米短跑,不仅仅是速度的问题。
人在跑步时都会有惯性,尤其是以非常高的配速进行。同样研究人员也得思考,如何让Cassie适应这种惯性。
不能站着离开起跑线,到终点后,直接摔倒翻滚起来。
这意味着Cassie必须使用两个神经网络,一个用于快速奔跑,一个用于静止不动,并在两者之间进行优雅地过渡。
为此,研究团队用了一周时间跟着Cassie跑,提前完成了为期一年的模拟训练,进而确定了最有效的步态。
当然,训练的时候有一个必不可少的项目——平衡性测试。
翻译过来就是:用力「踹一脚」……
带头实现吉尼斯壮举的研究生Devin Crowley表示,
过去几年里,我们一直寻找实现这一世界纪录方式。机器学习方法长期以来一直用于模式识别,例如图像识别,但为机器人生成控制行为却是新的领域。
人工智能教授Alan Fern称,这个站立姿势的开始和停止比跑步更困难,就像起飞和降落比实际驾驶飞机更难一样。
正是通过完美的机械设计,以及与控制该硬件的先进人工智能深入融合,最终,Cassie在24.73秒内完成了100米冲刺。
用深度强化学习走路
这次的主角Cassie,是2017年由Agility Robotics推出的机器人研究一种开发平台。
要说我们最熟悉的双足机器人,还得是波士顿动力公司的Atlas。
到目前为止,它已经向我们展示了许多探索的能力。
比如,跑酷、空翻、过独木桥、跳舞等等。
此前,Cassie也曾与波士顿动力的一款四足机器人Spot同框,进行了一次「亲切友好的会面」。
虽然知名度比不上波士顿动力,但Cassie在这几年时间里的发展,也相当迅速。
2017年,只有3个月大的Cassie首次亮相。
2018年,Agility Robotics获得了来自安卓之父的投资。
这时,它那两条优美的大腿就能够适应各种坎坷的环境,越过障碍物。

还能够像人类一样玩平衡车...
2019年,Cassie学会了横着走,而且非常地稳健。
2020年的时候,Cassie已经可以一蹦一跳了。

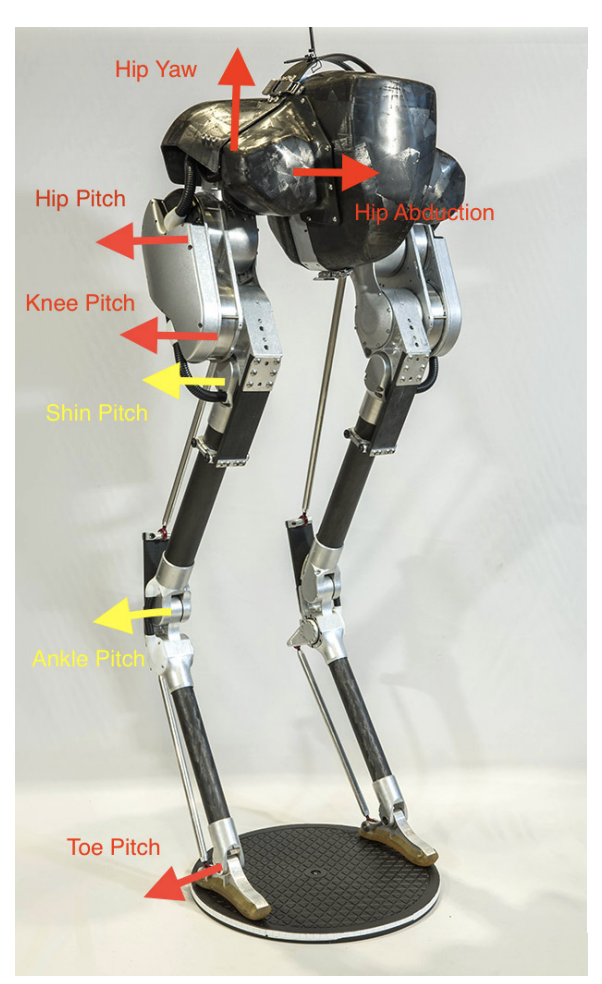
而这些成绩的实现,离不开Cassie那两条有着复杂的传动机制的双腿。
如图红色箭头代表的是主动关节,黄色箭头是被动关节。
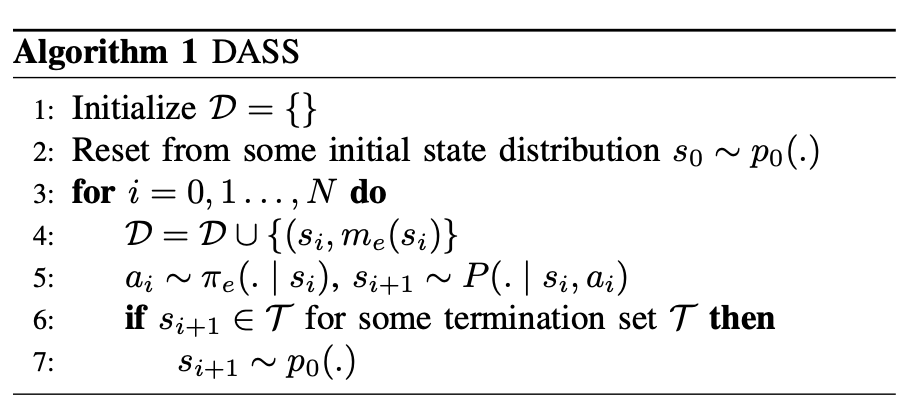
当然,光有机械设计还不够,想让这双腿学会这一行走技能,就要用到强化学习和模仿学习算法了。
在此,强化学习用来解决马尔可夫决策过程(MDP)的最优策略,需要用到策略梯度算法。
模仿学习则需要解决参数策略问题。
随后,将关键算法DASS与强化学习、模仿学习结合一起,进而为机器人设定策略。
由于Cassie像人类一样,它拥有一个三自由度的髋关节,允许机器的腿部能够向前、向后和侧面移动,同时还能完成腿部旋转动作。
所以在未来还可能制作成外骨骨骼,可穿戴动力假肢等等。
此次,Cassie创下百米短跑纪录又是一大进步。
吉尼斯世界纪录称,Cassie的这项纪录是机器人运动界的里程碑。
这不,马斯克的机器人也快要发布了,不知Tesla Bot会给我们带来怎样的惊喜?




