多目标追踪最新顶会论文集锦【ICML2020】【CVPR2020】
【回复文章名字前面的编号 获取论文pdf及项目源码云盘链接】
cv02:实现实时多目标跟踪
cv03:基于不相交路径消除的多目标跟踪
cv04:仅仅欺骗检测是不够的:对抗多目标跟踪的攻击
cv05:学习多目标跟踪的神经求解器
cv06:如何训练你的深度多目标跟踪器
摘要:
现在多目标跟踪系统通常采用检测跟踪的模式。1)目标定位的检测模型,2)数据关联的外观嵌入模型。单独执行两个模型可能会导致效率问题,因为运行时间只是两个步骤的总和,而没有研究它们之间可以共享的潜在结构。现有的实时MOT研究多集中在关联步骤上,本质上是实时关联方法,而不是实时MOT系统。
在本文中,我们提出了一个MOT系统,该系统允许在共享模型中学习目标检测和外观嵌入。具体来说,我们将外观嵌入模型合并到单镜头检测器中,使模型可以同时输出检测结果和相应的嵌入结果。因此,系统被制定为一个多任务学习问题:有多个目标,即:锚点分类、边界盒回归、嵌入学习;个人损失会自动加权。
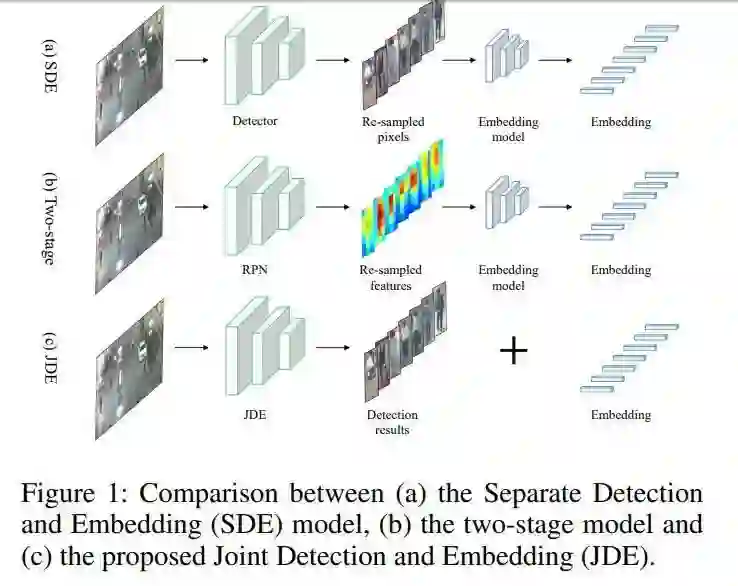
据我们所知,这项工作报告了第一个(近)实时MOT系统,根据输入分辨率的不同,运行速度为18.8到24.1帧/秒。同时,它的跟踪精度可与体现分离检测和嵌入(SDE)学习的最新跟踪器相媲美(在MOT-16挑战中,64.4% MOTA vs . 66.1% MOTA)。
代码和模型可在https://github.com/zhongdao/towards-realtimemot 下载。
关注人工智能学术前沿 回复 :cv02
5秒免费获取论文pdf文档及源码
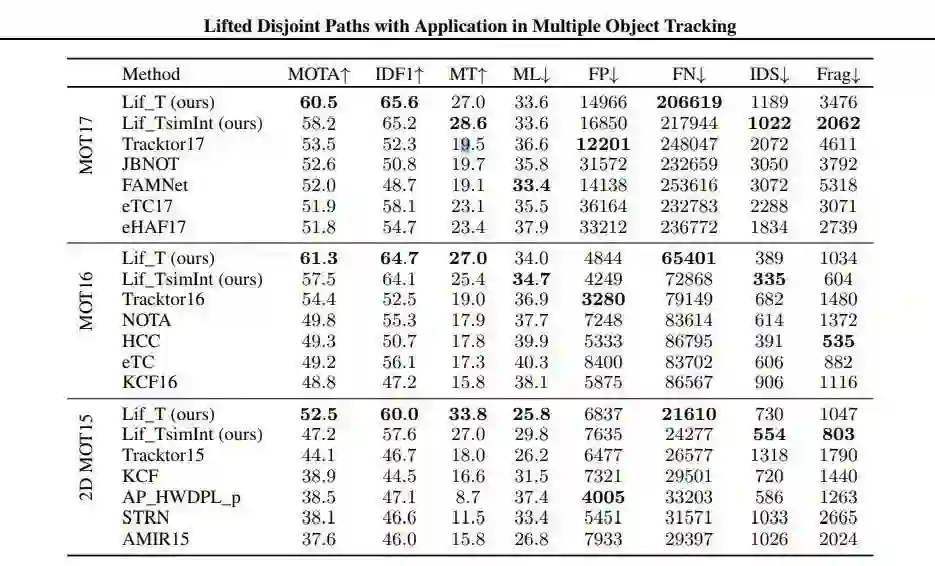
摘要:
我们对不相交路径问题进行了扩展,其中引入了附加的提升边来提供路径连通先验。我们将得到的优化问题称为不相交路径问题。通过对整数多商品流和3-SAT的简化,证明了该问题是np困难的。为了实现实际的全局优化,我们提出了几类线性不等式,可以产生高质量的松弛。此外,我们提出了有效的切割平面算法来分离所提出的线性不等式。提升不相交路径问题是一个多目标跟踪的自然模型,并允许一个优雅的数学公式的长期时间交互。提升边缘有助于防止身份转换和重新识别人员。我们的提升不相交路径跟踪器实现了接近最优分配的输入检测。因此,它在MOT挑战的所有三个主要基准上都处于领先地位,大大超过了最先进的水平。
关注人工智能学术前沿 回复 :cv03
5秒免费获取论文pdf文档,及项目源码
摘要:
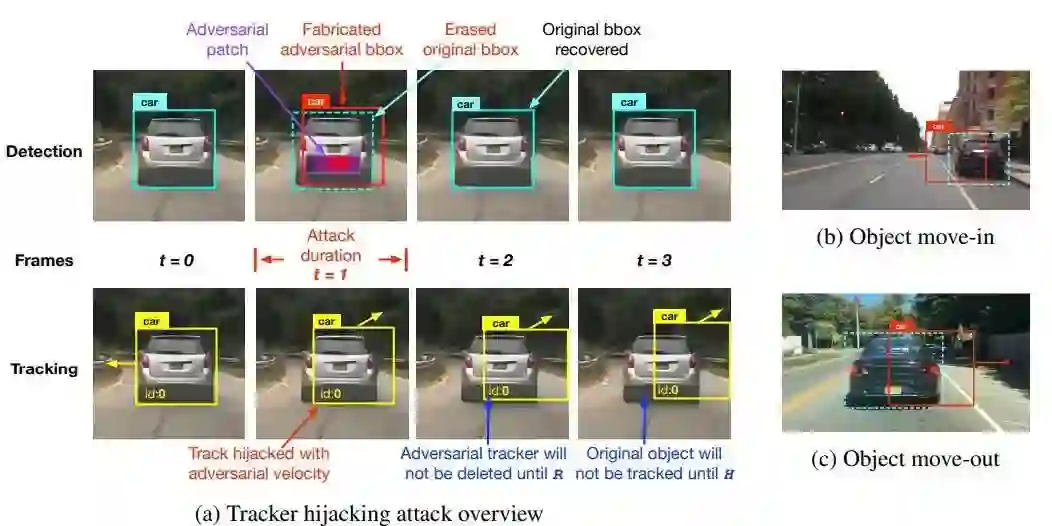
近年来对抗性机器学习的研究开始关注自动驾驶中的视觉感知,并对目标检测模型的对抗性实例进行了研究。然而,在这种视觉感知管道中,还必须跟踪被检测到的物体,这一过程称为多目标跟踪(MOT),以建立周围障碍物的运动轨迹。因为年检被设计成健壮的针对对象检测错误,它构成了一般挑战现有的攻击技术,反对盲目的目标检测:我们发现的成功率超过98%需要他们实际上影响跟踪结果,要求没有现有的攻击技术可以满足。
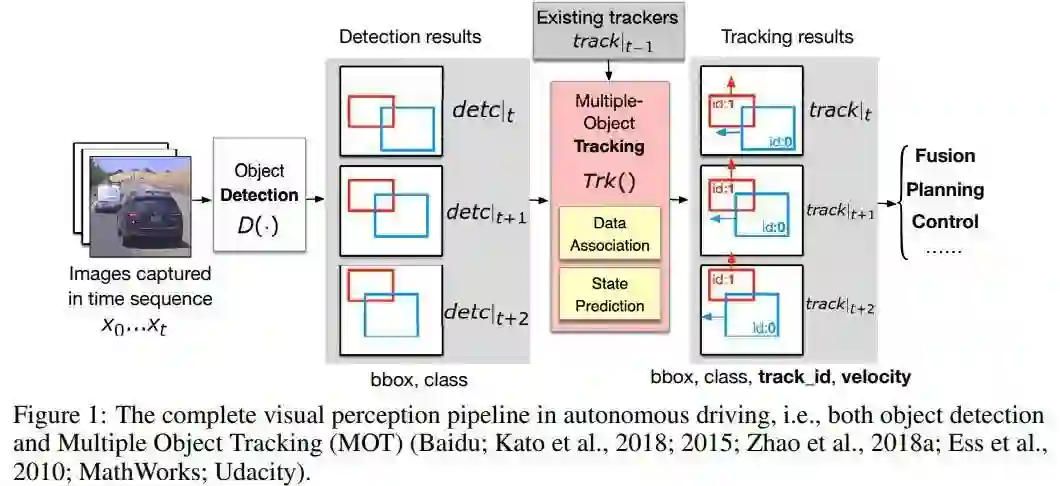
本文首次研究了自动驾驶系统中针对完整视觉感知管道的敌对机器学习攻击,发现了一种利用AEs在目标检测上有效欺骗MOT的新攻击技术——跟踪器劫持。使用我们的技术,成功的AEs仅在一个帧上就可以移动现有的物体进入或离开自动驾驶汽车的前进方向,从而造成潜在的安全隐患。我们使用Berkeley Deep Drive数据集进行评估,发现平均攻击3帧时,我们的攻击成功率接近100%,而盲目检测目标对象的攻击成功率只有25帧.
关注人工智能学术前沿 回复 :cv04
5秒免费获取论文pdf文档,及项目源码
摘要:
图提供了一种自然的方式来制定多目标跟踪(MOT)在跟踪检测范式。然而,它们也为学习方法引入了一个主要的挑战,因为定义一个可以在这样的结构化领域上操作的模型是很重要的。因此,大多数基于学习的工作都致力于为MOT学习更好的特性,然后将这些特性与完善的优化框架一起使用。在本工作中,我们利用经典的MOT网络流公式来定义一个基于消息传递网络(MPNs)的完全可区分框架。通过直接在图域上操作,我们的方法可以对整个检测集进行全局推理,并预测最终的解决方案。因此,我们表明MOT学习不需要局限于特征提取,它也可以应用于数据关联步骤。我们展示了MOTA和IDF1在三个公开基准测试中的显著改进。我们的代码可以在https://bit.ly/motsolv 下载
关注人工智能学术前沿 回复 :cv05
5秒免费获取论文pdf文档,及项目源码
摘要:
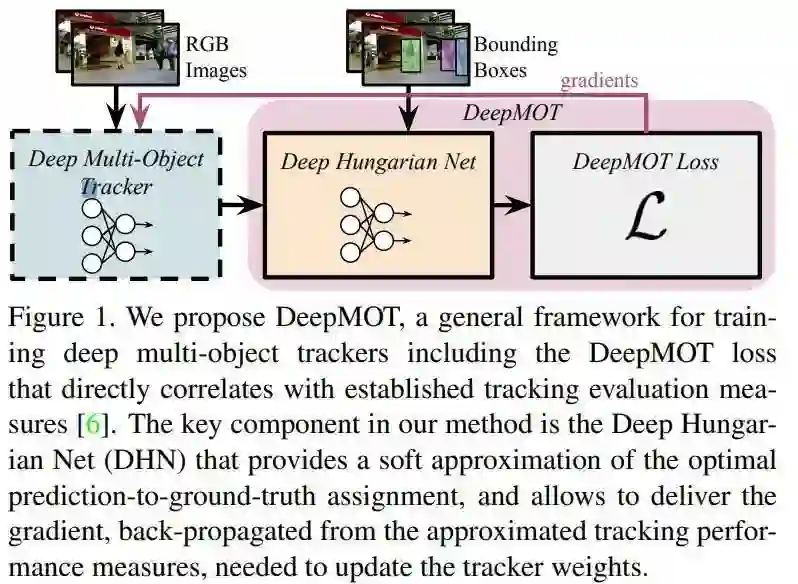
基于视觉的多目标跟踪(MOT)的最新趋势是利用深度学习的代表性力量来联合学习检测和跟踪目标。然而,现有的方法只使用损失函数训练某些子模块,而这些函数往往与建立的跟踪评估措施(如多目标跟踪精度(MOTA)和精度(MOTP))无关。由于这些措施不可微,如何选择合适的损失函数用于多目标跟踪方法的端到端训练仍然是一个有待研究的问题。在本文中,我们通过提出MOTA和MOTP的可微代理来弥补这一差距,我们将其合并为一个适合于深度多目标跟踪器端到端训练的损失函数。作为一个关键的组成部分,我们提出了一个DeepHungarian Net(DHN)模块,它近似Hungarian匹配算法。DHN允许估计目标轨迹和地面真值对象之间的对应关系,计算MOTA和MOTP的可微分代理,进而直接用于优化深度跟踪器。实验证明,所提出的可微框架改善了现有多目标跟踪器的性能,并在MOTChallenge基准测试上建立了一种新的技术。
我们的代码可从https://github.com/yihongXU/deepMOT 公开获得。
关注人工智能学术前沿 回复 :cv06
5秒免费获取论文pdf文档,及项目源码
文字来源于网络 侵删
翻译:人工智能学术前沿

扫码关注我们
微信号 : zzh1464501547
qq群:966308496
今日头条:人工智能学术前沿
知乎:人工智能学术前沿



