多目标追踪器:用 OpenCV 实现多目标追踪(C++/Python)
由极市、机器之心和中科创达联合举办的“2018计算机视觉最具潜力开发者榜单”评选活动,现已接受报名,杨强教授、俞扬教授等大牛嘉宾亲自评审,高通、中科创达、微众银行等大力支持,丰厚奖励,丰富资源,千万渠道,助力您的计算机视觉工程化能力认证,提升个人价值及算法变现。极市与您一起定义自己,发现未来~点击阅读原文即可报名~
来源:AI研习社
原文 :MultiTracker : Multiple Object Tracking using OpenCV (C++/Python)
链接:https://www.learnopencv.com/multitracker-multiple-object-tracking-using-opencv-c-python/
在本文中,我们将谈到如何用 OpenCV 的多目标追踪API,通过使用 MultiTracker 类来实现。我们将分享用 C++ 和用 Python 实现的代码。在我们深入探讨细节之前,请检查下边列出来的之前的关于目标追踪的帖子,理解用 OpenCV 实现的单目标追踪器的基本原理。
1.用 OpenCV 实现目标追踪
2.GOTURN: 基于深度学习的目标追踪
为什么我们需要多目标追踪
大多数计算机视觉和机器学习的入门者都学习目标识别。如果你是一个初学者,你可能会思考我们到底为什么需要目标追踪。我们为什么不能只是在每一帧检测目标?我们来探索追踪很有用的几个原因。
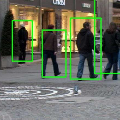
首先,当视频的一帧中有多个目标(这里指人)时,追踪帮助建立帧之间的目标同一性。
第二,在一些情况下,目标检测可能失败但是仍有可能追踪目标,因为追踪考虑到目标在前一帧中的位置和外观。
第三,一些追踪算法是非常快的,因为他们做局部搜索而非全局搜索。所以通过每隔 n 帧做目标检测并在中间的帧做目标追踪,我们的系统可以获得很高的帧速。
所以,为什么不在第一次检测后无限期地跟踪这个对象呢?一个追踪算法有时可能会丢掉它所追踪的目标的轨迹。例如,当目标的移动太大,一个追踪算法可能不能保持一直追踪。所以现实中许多应用将检测和追踪一起使用。
在这个教程中,我们将只关注追踪这部分,我们将通过在对象周围放置一个边界框来指定想要跟踪的对象。
多目标追踪:OpenCV 的多目标追踪器
OpenCV 中的 MultiTracker 类提供了多目标追踪的实施方法。他是一个简单的实施方法因为他独立地处理被追踪的目标,不需要在多个被追踪对象之间做任何优化。让我们一步步查看代码,学习我们如何用 OpenCV 的多目标追踪 API。
为了能容易地跟着这个教程学习,请点击下面的按钮,下载代码。代码是免费的!
代码下载链接:https://bigvisionllc.leadpages.net/leadbox/143948b73f72a2%3A173c9390c346dc/5649050225344512/
第一步:创建单目标追踪器
一个多目标追踪器是由一系列简单的单目标追踪器组成的。一开始,我们先定义一个函数,用追踪器类型作为输入并创建一个追踪器对象。OpenCV 有八个不同的追踪器类型:BOOSTING, MTL, KCF, TLD, MEDIANFLOW, GOTURN, MOSSE, CSRT.
如果你想用 GOTURN 追踪器,请确保阅读这篇文章并下载caffe模型。在下面的代码中,给出追踪器类别的名字,我们返回追踪器对象。这个追踪器会用于多目标追踪器。
Python
from __future__ import print_function
import sys
import cv2
from random import randint
trackerTypes = ['BOOSTING', 'MIL', 'KCF','TLD', 'MEDIANFLOW', 'GOTURN', 'MOSSE', 'CSRT']
def createTrackerByName(trackerType):
# Create a tracker based on tracker name
if trackerType == trackerTypes[0]:
tracker = cv2.TrackerBoosting_create()
elif trackerType == trackerTypes[1]:
tracker = cv2.TrackerMIL_create()
elif trackerType == trackerTypes[2]:
tracker = cv2.TrackerKCF_create()
elif trackerType == trackerTypes[3]:
tracker = cv2.TrackerTLD_create()
elif trackerType == trackerTypes[4]:
tracker = cv2.TrackerMedianFlow_create()
elif trackerType == trackerTypes[5]:
tracker = cv2.TrackerGOTURN_create()
elif trackerType == trackerTypes[6]:
tracker = cv2.TrackerMOSSE_create()
elif trackerType == trackerTypes[7]:
tracker = cv2.TrackerCSRT_create()
else:
tracker = None
print('Incorrect tracker name')
print('Available trackers are:')
for t in trackerTypes:
print(t)
return tracker
C++
注意:除了需要 include opencv2 / opencv.hpp 之外,你还需要 include opencv2 / tracking.hpp 。
#include <opencv2/opencv.hpp>
#include <opencv2/tracking.hpp>
using namespace cv;
using namespace std;
vector<string> trackerTypes = {"BOOSTING", "MIL", "KCF", "TLD", "MEDIANFLOW", "GOTURN", "MOSSE", "CSRT"};
// create tracker by name
Ptr<Tracker> createTrackerByName(string trackerType)
{
Ptr<Tracker> tracker;
if (trackerType == trackerTypes[0])
tracker = TrackerBoosting::create();
else if (trackerType == trackerTypes[1])
tracker = TrackerMIL::create();
else if (trackerType == trackerTypes[2])
tracker = TrackerKCF::create();
else if (trackerType == trackerTypes[3])
tracker = TrackerTLD::create();
else if (trackerType == trackerTypes[4])
tracker = TrackerMedianFlow::create();
else if (trackerType == trackerTypes[5])
tracker = TrackerGOTURN::create();
else if (trackerType == trackerTypes[6])
tracker = TrackerMOSSE::create();
else if (trackerType == trackerTypes[7])
tracker = TrackerCSRT::create();
else {
cout << "Incorrect tracker name" << endl;
cout << "Available trackers are: " << endl;
for (vector<string>::iterator it = trackerTypes.begin() ; it != trackerTypes.end(); ++it)
std::cout << " " << *it << endl;
}
return tracker;
}
第二步:读取视频的第一帧
一个多目标追踪器需要两个输入
1.视频的一帧
2.你想要追踪的所有目标的位置(边界框)
给定这些信息,追踪器会在多有子序列帧中追踪这些特定目标的位置。
在下面的代码中,我们先用 VidoeCapture 类加载视频,读取第一帧。这一帧将会用于之后的 MultiTracker 的初始化。
Python
# Set video to load
videoPath = "videos/run.mp4"
# Create a video capture object to read videos
cap = cv2.VideoCapture(videoPath)
# Read first frame
success, frame = cap.read()
# quit if unable to read the video file
if not success:
print('Failed to read video')
sys.exit(1)
C++
// set default values for tracking algorithm and video
string videoPath = "videos/run.mp4";
// Initialize MultiTracker with tracking algo
vector<Rect> bboxes;
// create a video capture object to read videos
cv::VideoCapture cap(videoPath);
Mat frame;
// quit if unabke to read video file
if(!cap.isOpened())
{
cout << "Error opening video file " << videoPath << endl;
return -1;
}
// read first frame
cap >> frame;
第三步:在第一帧中定位物体
接下来,我们需要在第一帧中定位我们想要追踪的物体。位置是一个简单的边界框。OpenCV 提供了一个叫做 selectROI 的功能,它可以弹出一个 GUI 来选择边界框(也叫做感兴趣的区域(ROI))。在C++版本中,selectROI允许你得到多个边界框,但在 Python 版本中,它会只返回一个边界框。所以,在 Python 版本中,我们需要一个循环来得到多个边界框。
对于每个目标,我们还会选择随机的颜色来显示边界框。下面就是实现代码。
Python
## Select boxes
bboxes = []
colors = []
# OpenCV's selectROI function doesn't work for selecting multiple objects in Python
# So we will call this function in a loop till we are done selecting all objects
while True:
# draw bounding boxes over objects
# selectROI's default behaviour is to draw box starting from the center
# when fromCenter is set to false, you can draw box starting from top left corner
bbox = cv2.selectROI('MultiTracker', frame)
bboxes.append(bbox)
colors.append((randint(0, 255), randint(0, 255), randint(0, 255)))
print("Press q to quit selecting boxes and start tracking")
print("Press any other key to select next object")
k = cv2.waitKey(0) & 0xFF
if (k == 113): # q is pressed
break
print('Selected bounding boxes {}'.format(bboxes))
C++
// Get bounding boxes for first frame
// selectROI's default behaviour is to draw box starting from the center
// when fromCenter is set to false, you can draw box starting from top left corner
bool showCrosshair = true;
bool fromCenter = false;
cout << "\n==========================================================\n";
cout << "OpenCV says press c to cancel objects selection process" << endl;
cout << "It doesn't work. Press Escape to exit selection process" << endl;
cout << "\n==========================================================\n";
cv::selectROIs("MultiTracker", frame, bboxes, showCrosshair, fromCenter);
// quit if there are no objects to track
if(bboxes.size() < 1)
return 0;
vector<Scalar> colors;
getRandomColors(colors, bboxes.size());
getRandomColors 函数相当简单
// Fill the vector with random colors
void getRandomColors(vector<Scalar>& colors, int numColors)
{
RNG rng(0);
for(int i=0; i < numColors; i++)
colors.push_back(Scalar(rng.uniform(0,255), rng.uniform(0, 255), rng.uniform(0, 255)));
}
第四步:初始化多目标追踪器
直到目前,我们读到了第一帧并且得到了目标周围的边界框。这些是我们需要初始化多目标追踪器所需的全部信息。
我们首先创建一个 MuliTracker 对象并且增加和单个目标追踪器一样多的边界框。在这个例子中,我们用 CSRT 单目标追踪器,但是你尝试可以通过将 trackerTyper 变量改变为这篇文章一开始提到的8种追踪器中的一种,来尝试其使用他类型的追踪器。CSRT 追踪器不是最快的,但它在我们尝试的许多情况下都能生成最好的结果。
你可以用封装在同一个 MultiTracker 中的不同的追踪器,但是当然,这意义不大。
MultiTracker 类是一个简单的单目标追踪器的封装器。我们从前边的文章种知道,初始化单目标追踪器,我们需要视频第一帧和用来标定我们想要追踪的目标位置的边界框。多目标追踪器将这些信息传递给它内部封装的单目标追踪器。
Python
# Specify the tracker type
trackerType = "CSRT"
# Create MultiTracker object
multiTracker = cv2.MultiTracker_create()
# Initialize MultiTracker
for bbox in bboxes:
multiTracker.add(createTrackerByName(trackerType), frame, bbox)
C++
// Specify the tracker type
string trackerType = "CSRT";
// Create multitracker
PtrmultiTracker = cv::MultiTracker::create();
// Initialize multitracker
for(int i=0; i < bboxes.size(); i++)
multiTracker->add(createTrackerByName(trackerType), frame, Rect2d(bboxes[i]));
第五步:更新多目标追踪器并展示结果
最后,我们的多目标追踪器已经准备好了,我们可以在新的帧中追踪多个目标。我们用 MultiTracker 类中的 update 的方法来定位新一帧中的目标。每个用来追踪目标的边界框都用不同颜色来画。
python
# Process video and track objects
while cap.isOpened():
success, frame = cap.read()
if not success:
break
# get updated location of objects in subsequent frames
success, boxes = multiTracker.update(frame)
# draw tracked objects
for i, newbox in enumerate(boxes):
p1 = (int(newbox[0]), int(newbox[1]))
p2 = (int(newbox[0] + newbox[2]), int(newbox[1] + newbox[3]))
cv2.rectangle(frame, p1, p2, colors[i], 2, 1)
# show frame
cv2.imshow('MultiTracker', frame)
# quit on ESC button
if cv2.waitKey(1) & 0xFF == 27: # Esc pressed
break
C++
while(cap.isOpened())
{
// get frame from the video
cap >> frame;
// Stop the program if reached end of video
if (frame.empty()) break;
//Update the tracking result with new frame
multiTracker->update(frame);
// Draw tracked objects
for(unsigned i=0; igetObjects().size(); i++)
{
rectangle(frame, multiTracker->getObjects()[i], colors[i], 2, 1);
}
// Show frame
imshow("MultiTracker", frame);
// quit on x button
if (waitKey(1) == 27) break;
}
*推荐阅读*
用OpenCV实现八种不同的目标跟踪算法
一种轻量级在线多目标车辆跟踪方法
杨强教授、俞扬教授等大牛嘉宾评审团,万元大奖,丰富资源,助力您的计算机视觉工程化能力认证,点击阅读原文即可报名“2018计算机视觉最具潜力开发者榜单”~