这只最讲「武德」的机器狗,要跟波士顿Spot一较高下!
新智元报道
新智元报道
编辑:小匀
【新智元导读】近日,一款名为Jamoca的四足移动机器人赚足了网友眼球,跑跳等基本功自不必说,还能轻松「趟过」梅花桩,波士顿spot机器狗来了,会不会水土不服?
能跑能跳能过梅花桩,Jamoca是最讲「武德」的四足机器人
能跑能跳能过梅花桩,Jamoca是最讲「武德」的四足机器人
「少林从师数十冬,梅花桩上练真功。持之以恒锐意修,定可成名盖群雄。」
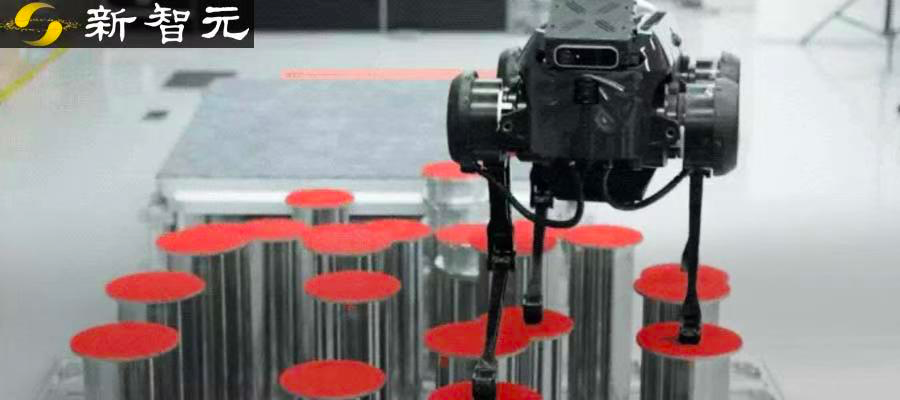
梅花桩是中国功夫的重要训练道具之一,习练梅花桩也是武侠小说中修炼轻功的基础。现在,梅花桩上迎来了一位新的“练功者”—— 腾讯四足移动机器人 Jamoca。

四足移动机器人,更常见的一个名字是机器狗。
腾讯 Robotics X 实验室在外部提供的本体之上,基于自研的机器人控制技术,为 Jamoca 打造了一个能应对复杂环境的智能大脑。
这个大脑让 Jamoca 能行走、小跑和跳跃,并赋予了它自主定位和避障的能力。
此次 Jamoca 完成的挑战由高60厘米、呈20°斜面角度的台阶和邻桩最大高度差16厘米、间距不等的梅花桩两部分组成。
据腾讯 Robotics X 实验室研究员介绍,和国际上其他四足机器人走木块的场景比较,此次 Jamoca 所挑战的梅花桩落脚面积更小、高度更高,并有台阶的组合,实现的难度要更大。
其中,考验机器人移动能力的难点主要有两个:理解梅花桩的排布(包括位置和高度)、选择最佳落脚点及路线并稳定精准地行走(落脚到梅花桩中心点)。
这正对应了实验室在移动技术方面钻研的的两个核心技术模块:感知、运动规划与控制;同时二者通过实验室的另一核心技术模块:整机系统设计与搭建,实现了系统性的集成融合。
从 Jamoca 挑战的结果看,腾讯 Robotics X 实验室已经达到了极高的技术标准——误差1厘米内的感知定位、根据环境进行的10毫秒级路线规划、基于动力学的1KHz实时力矩控制、梅花桩中心点1厘米内的落脚误差,以及全系统的高度协同。
在精准环境感知方面,Jamoca 创新性地实现了鲁棒的眼脚标定,并利用RGB-D相机对周围环境进行实时的感知。
通过特征点匹配的方式,对 Jamoca 自身的运动轨迹进行在线跟踪,并将基于视觉的定位信息与基于运动学的里程计信息和 IMU(Inertial measurement unit,惯性测量单元) 数据进行融合,提高了定位追踪的精度和频率。
同时利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置,将定位和识别的数据进行融合,从而重建出整个三维运动场景。
在最优运动线路规划和实时的运动控制方面,Jamoca 基于感知系统实时感知到的机器人本体及梅花桩位置信息,基于质心动力学,实现在线的质心轨迹生成和落脚点规划。
在保证机器人的四条腿可以安全地踏到下一步的梅花桩的同时,优化出一条本体移动长度最短、综合耗力最小的运动轨迹,并且可以在线持续地进行上述运动规划。
同时,基于实时的本体状态估计,Jamoca 能够结合质心动力学模型来构建优化问题,实时求解机器人足端所需的地面反作用力,并结合反馈控制实现精准鲁棒的实时力控,可完成行走、对角小跑以及跳跃等的运动控制。
不同于预先设计好规则之后做重复的运动的工业机器人,Robotics X 实验室更关注机器人有意识、有判断的自主特性研究,目的就是要在有很大不确定性的动态环境里,能够实现机器人的自主判断、自主决策,并自主完成任务。

现阶段,Jamoca 主要用于实验室内部科研实验。它的在线环境感知、最优运动规划和实时运动控制等能力,未来将帮助腾讯其他机器人产品更好地适应复杂的现实环境。
不怕走弯路,这个平衡小摩托稳过「不倒翁」
不怕走弯路,这个平衡小摩托稳过「不倒翁」
此次一同亮相的,还有一款自平衡轮式移动机器人,也可称之为自平衡自行车,是腾讯 Robotics X 实验室的首个整机自研机器人。
它在传统轮式移动机器人的基础上,增加了动量轮及其电机驱动系统,使得机器人可以在静止及行进状态下均保持平衡不倒。
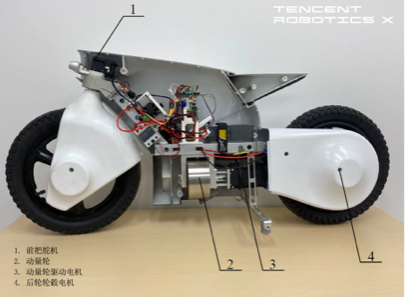
自平衡轮式移动机器人的硬件平台完全由腾讯Robotics X自研,重约15公斤,长1.15米,高0.52米
它的控制能力又可以细分为行进中的动态自平衡和停止行进时的静态自平衡。行进中的动态自平衡是依靠前把转动进而带动车身的转动实现,而停止行进时的静态自平衡则采用动量轮力矩平衡技术,应用角动量守恒的原理实现自平衡控制。

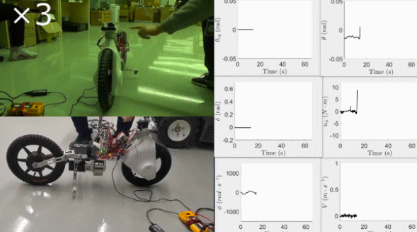
依靠平衡算法,即使受到一定的外界干扰,腾讯自平衡轮式移动机器人仍然可以在保持自平衡状态的同时,实现平稳地向前行驶。

机器人在不同的路面状况下,例如遇到上下坡时,也都表现出了较好的运动能力和平衡性能。甚至对于行驶路径上存在特定约束的情况,比如沿着独木桥行驶的场景,它也能从容应对。
在此前举行的机器人行业国际顶会IROS 2020上,腾讯 Robotics X 实验室发布的两篇平衡控制方向的Oral论文,就来自于该机器人项目。
IROS由IEEE(电气和电子工程师协会)和RSJ(日本机器人学会)共同举办,是机器人领域三大国际顶级会议之一,今年的主题为Consumer Robots and Our Future,接收来自机器人与人工智能、机器人视觉、传感器、云机器人等相关领域的研究。
在第一项研究《自平衡轮式移动机器人的非线性平衡控制:设计与实验》中,腾讯 Robotics X 实验室与纽约大学合作研究了自平衡轮式移动机器人的动静态平衡控制的稳定性问题。
在传统轮式移动机器人的基础上,腾讯 Robotics X 实验室增加了动量轮和电机驱动系统,使用了级联与阻尼配置的无源控制(Interconnection and Damping Assignment - Passivity Based Control, IDA-PBC)方法,并应用李雅普诺夫理论从理论上证明了自平衡轮式移动机器人的闭环系统稳定性。
此外,实验室还在自建平台上证明了新控制器效果良好,能让机器人保持自平衡,并有一定的抗外界干扰能力。
而在另一项研究《自平衡轮式移动机器人平衡的增益规划控制器设计》中,不同于传统方法将静态和动态平衡区分对待,研究团队建立了可以同时描述轮式移动机器人动态特性和静态特性的统一的数学模型。

基于同一个模型,动态平衡和静态平衡对不同驱动输入的依赖程度不同,无法使用同样的控制参数。因此,研究团队使用基于增益规划(Gain Scheduling)的控制方法。该控制方法可在两种情况下都保持轮式机器人的平衡,这一点在理论和实验中都得到证明。
Robotics X:搭建移动机器人领域的「底层建筑」
Robotics X:搭建移动机器人领域的「底层建筑」
11月20日,腾讯公布了其在移动机器人研究方面的新进展:四足移动机器人 Jamoca 和自平衡轮式移动机器人首次对外亮相。
Jamoca 是国内首个能完成走梅花桩复杂挑战的四足机器人,而自平衡轮式移动机器人的相关研究成果还入选了机器人行业的顶级会议 IROS 2020。
这两项进展均来自腾讯 Robotics X 实验室,属于移动方向上的技术突破,也是机器人最基础的能力之一。
腾讯 Robotics X 实验室于2018年成立,致力推进人机协作的下一代机器人研究,打造虚拟世界到真实世界的载体与连接器。目前实验室主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用,并聚焦于多模态移动机器人的研发。
Jamoca 本体基于外部提供的硬件平台改装,重约70公斤,长1米、宽0.5米、站高0.75米
Robotics X 主攻机器人移动、灵巧操作和智能体等三大核心通用技术的研究与应用。
其中,移动是机器人最基础的能力之一,此次发布的两项进展就属于移动方向。
而移动方向又可分为四个技术模块:机械设计、感知、运动规划与控制、整机系统设计与搭建。通俗的说,前三者分别是机器人的躯干、眼睛和大脑,最后一项则是它的各“器官”协调的能力。
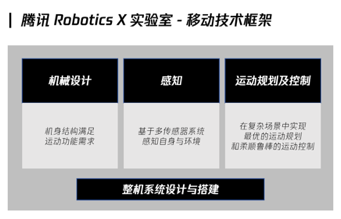
算法自研的 Jamoca 正是结合了腾讯在感知、运动规划与控制两方面的研究成果,而整机自研的自平衡轮式移动机器人则可以视作腾讯在机器人的机械设计和整机系统设计与搭建方向能力上的一个里程碑项目。
腾讯 Robotics X 与腾讯 AI Lab 实验室主任张正友博士表示:“移动或运动能力,是机器人最核心、也是最基本的能力之一,决定了它能去到什么场景,做什么事情,未来有什么样的想象力。我们很高兴能看到这两项进展,并将继续深入探索机器人的通用能力,为虚拟到真实世界搭建一个有力的桥梁。”






