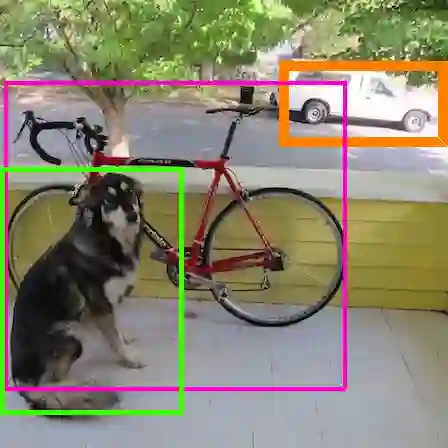
DRBox采用定向框来克服遥感图像中水平检测框的困难。定向框是一个带有angle参数的矩形,用于定义其方向。其需要五个参数来回归其位置,大小和方向。与水平检测框相比,定向框更紧密地围绕了目标的轮廓,比水平框包含更少的背景像素,因此目标和背景之间的分类更容易。
详细可参考:
(DRBox)
https://github.com/liulei01/DRBo
(DRBoxv2)
https://github.com/ZongxuPan/DrBox-v2-tensorflow
1.3 推荐思路
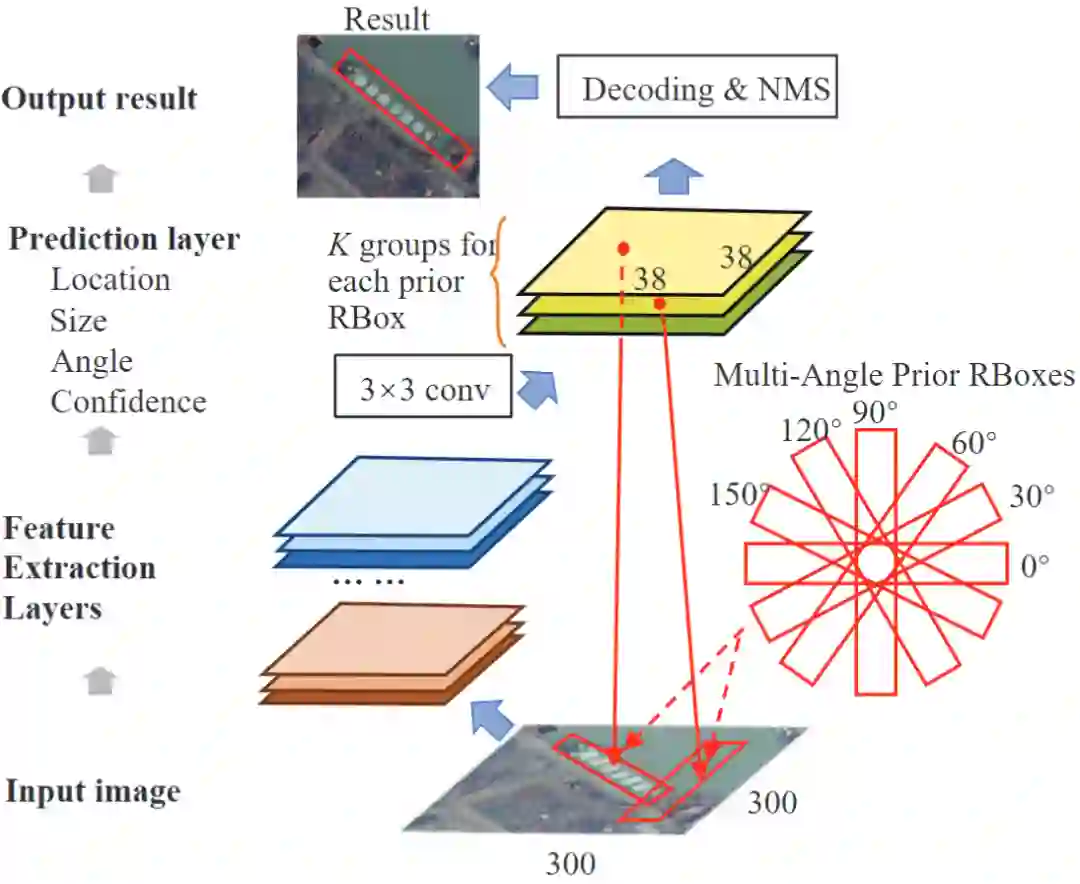
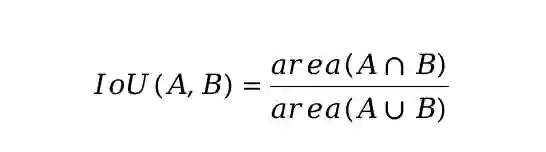
传统的YOLOv3采用无旋转矩形框的方式来检测目标,与之相关的操作也基本保持这个特性,例如先验框的设定,训练过程中匹配先验框的机制以及NMS过程中
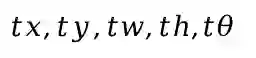
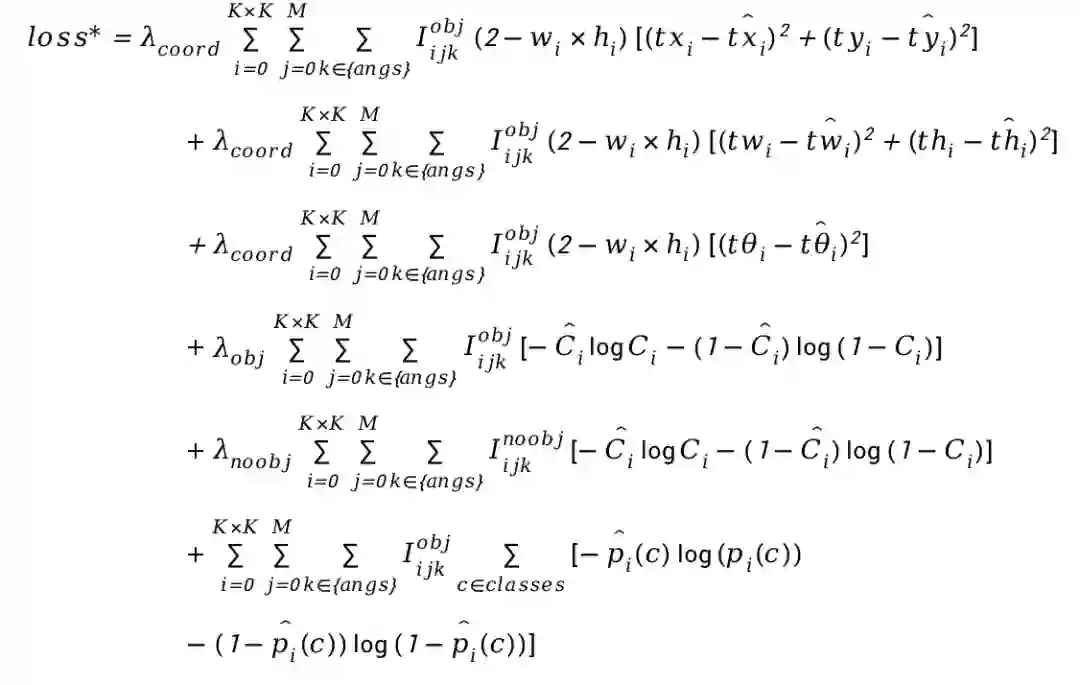
IoU的计算等。而在旋转矩形建模下,其最大的不同在于额外引入了旋转角
θ。因此,上述相关的操作过程要根据进行调整。
1.3.1 先验框设置
在原始的YOLOv3中,主要包含以下一些先验框。这里以基础网络为darknet-53,网络输入大小为416×416举例说明。
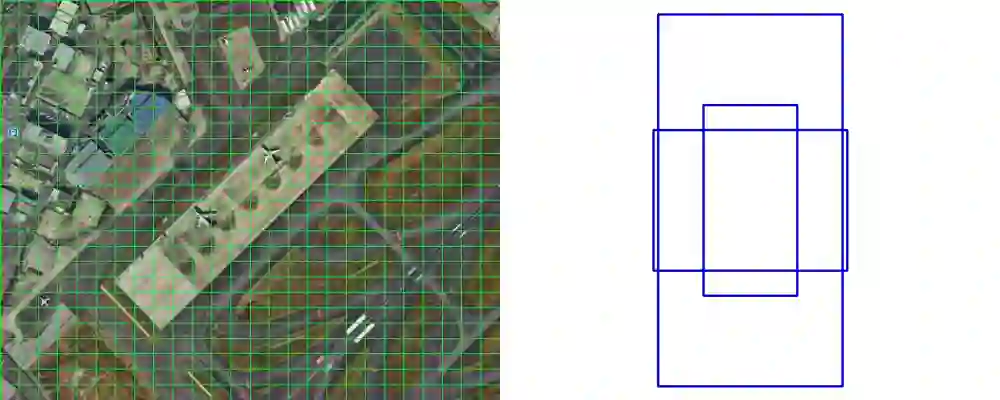
1)scale1(13×13):在该尺度特征图上,每个点对应3个不同大小的先验框,分别是[116,90],[156,198]和[373,326],如图3-3所示。


 )变为(
)变为(
 ),其中
),其中





 ;
B表示先验框,旋转角度为
;
B表示先验框,旋转角度为
 ;
;
 表示将先验框
B绕中心点旋转,使得其与目标框
A具有同样的旋转角度。因此,
Ar
表示将先验框
B绕中心点旋转,使得其与目标框
A具有同样的旋转角度。因此,
Ar 。
。
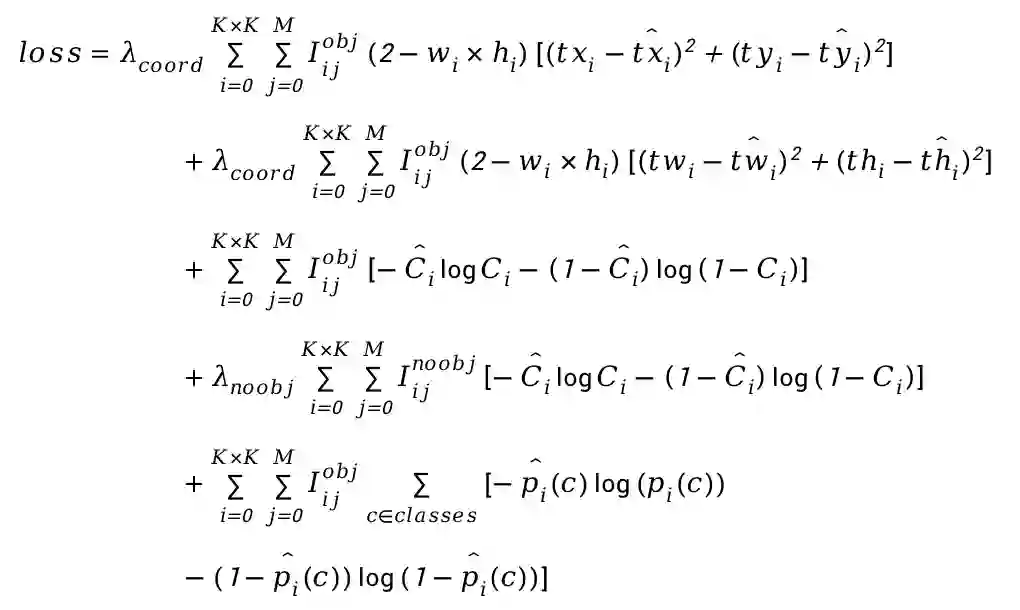
 。同时对于每个尺度特征图上的点,会设置
M个先验框,每个先验框会预测
。同时对于每个尺度特征图上的点,会设置
M个先验框,每个先验框会预测
 个数值,分别是边框偏移量(
个数值,分别是边框偏移量(
 ),置信度
C以及属于每个类别的概率。
),置信度
C以及属于每个类别的概率。