无人快递小车惊艳亮相首师校园 ! 自动驾驶免费培训+大赛

金秋9月,正是一年开学季,各大高校的同学们纷纷走在取快递的路上,最近在首都师范大学校园内,一辆载着大件快递的无人小车在校道上自如行驶的场景,成功吸引了一众师生的目光,在校园怒刷了一波存在感。
由于近期正处于老生开学与新生报到期间,再加上疫情原因导致校园相对封闭,外出购物较为不便,许多同学都选择了邮寄生活用品与线上购物。
然而这样一来,取快递也成了麻烦事,特别是收取大件快递时更是非常不易。另外,近期校园的快递点人流量空前极大,也不利于疫情防控。

无人小车的出现便完美解决了这些难题。
首先,无人小车做到了全程无接触配送,安全卫生,减少传染风险,便于疫情防控。
其次,无人小车速度可根据人流量变化,人多时降低速度,保证人车安全;人少时提高速度,保证高效。而且别看小车体积小,可它一次性运送20kg的快递包裹都不在话下!
只需设定好运输快递的起点和终点宿舍楼位置,即可在宿舍等待小车满载快递归来了,是不是十分便利呢?
对于无人小车运送快递的场景,大家是不是感觉很神奇呢?图图带你揭晓无人小车自动驾驶秘密吧!
如下图,无人小车搭载了16线激光扫描仪,以及GNSS定位天线和IMU,小车内置电脑中搭载了Autoware自动驾驶系统,以及小车的控制底盘。
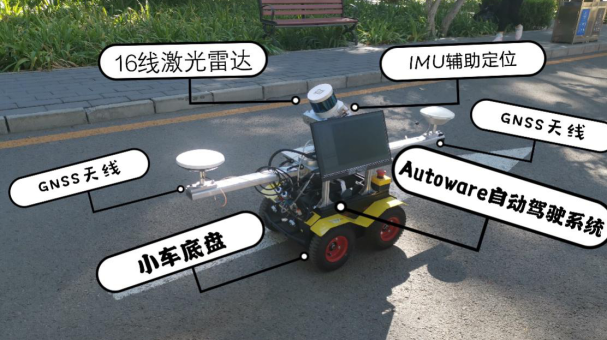
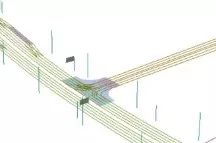
激光雷达可以采集校园点云数据,这是无人驾驶的基础。通过点云数据,绘制出校园的无人驾驶高精度地图,特别是从快递点到各个宿舍之间的地图路线。将绘制好的地图数据导入自动驾驶系统后,小车便能实现起点到终点的路径规划。
通过Autoware自动驾驶系统对底盘发出的一系列指令,就可以实现对小车速度变化、转弯等的控制,再加上GNSS+IMU融合定位,小车即可实现自动驾驶了。
(Autoware系统展示(gif图))
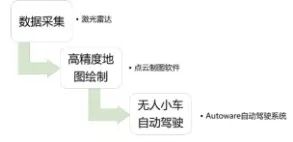
(自动驾驶流程图)
▣ 我们的特色 高精度地图的作用
这辆无人小车的自动驾驶及校园快递运送是由首师大资源环境与旅游学院钟若飞教授的无人小车团队实现的。从2019年9月到如今,在一年的时间中,团队凭借对无人驾驶的深厚兴趣,从零开始探索尝试,经过不断努力,完成了大量无人小车的驾驶实验。

现如今,许多科技公司都纷纷开展无人驾驶研究工作,在领域中已取得许多可观成果。相信在未来,无人小车的应用会更加广泛,为我们的生活提供更多便利;无人驾驶汽车也一定会造福于社会、造福于人类。
而钟教授团队区别于世面常见的无人驾驶的显著特点是,高精度地图时刻为无人小车的自动驾驶发挥作用。
团队将高精度地图作为无人驾驶一个永不失效的传感器,在激光雷达传感器、高清摄像头都无能为力的场景下,地图丰富的语义信息都能一直为小车的路径决策与速度变化保驾护航。

看完了对于无人小车自动驾驶的描述,大家觉得有没有更感兴趣呢?
担心太难了搞不懂?或者费用太高得不偿失?团队组织了免费的无人小车自动驾驶的培训课程,打消你的一切顾虑!从理论知识到小车实地测试,从零基础教会大家让自己的小车顺利上路。
培训时间:10月5日—10月7日 每晚19:30
课程安排:
课程 名称 |
|
|
|
移动测量与无人驾驶 10月5日晚 |
|
|
|
|
|
|
|
|
无人驾驶高精度地图与软件绘图 10月6日晚 |
|
|
|
|
|
|
|
|
ROS系统与Autoware自动驾驶仿真实现 10月7日晚 |
|
|
|
|
|
|
|
培训平台:腾讯会议
交流群:加负责人微信,拉你入群(备注:姓名+学校+参加小车培训)

学会了相关的技术,上手操作可是必不可少的!想不想亲自动手试试?来参加无人小车制图大赛吧!
本次无人小车制图大赛属于第六届全国激光大会(2020年11月中下旬)数据处理大赛的一部分,届时将在激光大会的现场进行实地基于高精度地图的无人车比赛。心动不如行动,偷偷告诉你:报名参赛全程完全免费,比赛前三名还有奖金拿!
一起了解一下大赛流程吧!
大赛指导思想与目的
《国务院关于印发新一代人工智能发展规划的通知》提到,无人驾驶、智能机器人等技术逐步投入实际应用是新时代科技发展的潮流,对于解决社会问题,建设智能城市有着重大意义。
本次大赛旨在于帮助全国高校的大学生、研究生学习无人驾驶的理论知识,深入了解高精度地图数据采集和成图方法,加强学生对测绘和地理信息系统的实践能力,从而培养对无人驾驶领域的专业人才,促进全社会的发展。
组织机构
主办单位:国际数字地球学会中国国家委员会
承办单位:中国地质大学(北京)、首都师范大学
赛事内容
本次大赛分为点云分类比赛、高精度地图制图比赛及实地无人小车自动驾驶比赛。
点云分类比赛:时间为9月-10月30日。点云分类比赛采用两组点云数据,分别为环城高速路点云数据与城市道路点云数据,考验参赛者点云数据预处理的能力,通过算法对点云分类别进行提取,分类后的点云也可作为制图的辅助数据。大会期间将组织专题对参赛的点云处理算法和结果进行介绍和交流。
高精度地图制图比赛:时间为9月-10月30日。高精度地图制图比赛采用与点云分类比赛同源的城市道路点云数据,参赛者可选择组织方提供的制图工具,也可以采用自制的工具,按照Autoware ADAS Map格式制作高精度地图,评价标准分为地图完整性和仿真测试两部分。
实地无人小车自动驾驶比赛:时间与全国激光大会时间一致。实地无人小车自动驾驶比赛将在大会举办前发布实地赛道数据,参赛者需要在赛车前完成高精度地图的绘制,在比赛现场,参赛着需要将地图导入无人小车,并自行配置使小车完成比赛。现场将通过小车搭载的高清摄像头及定位系统将小车位置与赛况实时上传到云平台,最终将对比每组小车自动驾驶的时间和赛道完成程度打分。


奖励设置
主办方将给大赛前三名颁发荣誉证书及奖金。
其他注意事项
1.培训及参赛全程免费
2.参赛者严禁互相抄袭,一旦查出取消参赛资格并在大会网站通报批评
3.数据严禁外传
大赛微信交流群(扫描下方二维码加群管理微信进群,备注:姓名+学校+数据处理大赛)


回放平台
知网平台:
http://k.cnki.net/Room/Home/Index/181822
B站:
https://space.bilibili.com/27032291
往期目录
汪荣贵——机器学习基本知识体系与入门方法
陈强——从Cell封面论文谈AI研究中的实验数据问题
石争浩——从先验到深度:低见度图像增强
行知论坛——南理工行知论坛&图图Seminar:智能画质增强专题
孙显——遥感图像智能分析:方法与应用
章国锋——视觉SLAM在AR应用上的关键性问题探讨
林宙辰——机器学习中优化算法前沿简介
白相志,冯朝路——“医学图像与人工智能”主题论坛
李雷达——以人为中心的图像感知评价:从质量到美学
汪荣贵——深度强化学习系列课程1-4讲
张明敏,郭诗辉——“人工智能与虚拟现实”主题论坛
高连如——高光谱遥感图像处理与信息提取
杨杨——“出身决定论”?看科研之路如何逆袭
于仕琪——步态识别新动向:基于人体模型的方法与数据
CCF YOCSEF南京——深度学习可解释性论坛
前沿进展 | 多媒体信号处理的数学理论
中国卫星遥感回首与展望
单目深度估计方法:现状与前瞻
目标跟踪40年,什么才是未来?
10篇CV综述速览计算机视觉新进展
算法集锦 | 深度学习在遥感图像处理中的六大应用
封面故事 | 从传统到深度:火灾烟雾识别综述
封面故事 | 光场数据压缩综述
学者观点 | 结合深度学习和半监督学习的遥感影像分类
编辑推荐 | 视频 + 地图!四维信息助力实景中国
深度学习+图像降噪,如何解决“卡脖子”问题?
专家推荐|高维数据表示:由稀疏先验到深度模型
专家报告 | AI与影像“术”——医学影像在新冠肺炎中的应用
专家推荐|真假难辨还是虚幻迷离,参与介质图形绘制让人惊叹!
学者推荐 | 深度学习与高光谱图像分类【内含PPT 福利】
专家报告|深度学习+图像多模态融合
专家报告 | 类脑智能与类脑计算
实战例题!200+PPT带你看懂监督学习
118页PPT!机器学习模型参数与优化那些事儿~
专家开讲 | 机器学习究竟是什么?
羡慕别人中了顶会?做到这些你也可以!
如何阅读一篇文献?
共享 | SAR图像船舶切片数据集
资源分享| 不知道如何获取最新的算法资讯?快来这里看一看
资源分享|热门IT资讯号推荐
本文系《中国图象图形学报》转载稿件
内容仅供学习交流
版权属于原作者
欢迎大家关注转发!
编辑:秀 秀
指导:梧桐君
审校:夏薇薇
总编辑:肖 亮
声 明
欢迎转发本号原创内容,任何形式的媒体或机构未经授权,不得转载和摘编。授权请在后台留言“机构名称+文章标题+转载/转发”联系本号。转载需标注原作者和信息来源为《中国图象图形学报》。本号转载信息旨在传播交流,内容为作者观点,不代表本号立场。未经允许,请勿二次转载。如涉及文字、图片等内容、版权和其他问题,请于文章发出20日内联系本号,我们将第一时间处理。《中国图象图形学报》拥有最终解释权。






