从零开始一起学习SLAM | 三维空间刚体的旋转
点击上方蓝字关注我,置顶更快接收消息!
刚体,顾名思义,是指本身不会在运动过程中产生形变的物体,如相机的运动就是刚体运动,运动过程中同一个向量的长度和夹角都不会发生变化。刚体变换也称为欧式变换。
视觉SLAM中使用的相机就是典型的刚体,相机一般通过人手持、机载(安装在机器人上)、车载(固定在车辆上)等方式在三维空间内运动,形式包括旋转、平移、缩放、切变等。其中,刚体在三维空间中最重要的运动形式就是旋转。那么刚体的旋转如何量化表达呢?
三维空间中刚体的旋转表示
三维空间中刚体的旋转总共有4种表示方法,高翔的十四讲中的第3讲比较详细的讲解了。本文提炼中最重要的内容,并加上实际使用过程中的经验总结进行了归纳。下面按照重要顺序分别进行介绍。
1、SLAM编程中使用比较频繁。需要重点掌握。
2、旋转矩阵不是一般矩阵,它有比较强的约束条件。旋转矩阵R具有正交性,R和R的转置的乘积是单位阵,且行列式值为1。
3、旋转矩阵R的逆矩阵表示了一个和R相反的旋转。
4、旋转矩阵R通常和平移向量t一起组成齐次的变换矩阵T,描述了欧氏坐标变换。引入齐次坐标是为了可以方便的描述连续的欧氏变换,这个在上一篇文章《从零开始一起学习SLAM | 为什么要用齐次坐标?》中有讲解。
5、冗余。用9个元素表示3个自由度的旋转,比较冗余。
1、SLAM编程中使用频繁程度接近旋转矩阵。稍微有点抽象,不太直观,但是一定得掌握。
2、四元数由一个实部和三个虚部组成,是一种非常紧凑、没有奇异的表达方式。
3、编程时候很多坑,必须注意。首先,一定要注意四元素定义中实部虚部和打印系数的顺序不同,很容易出错!
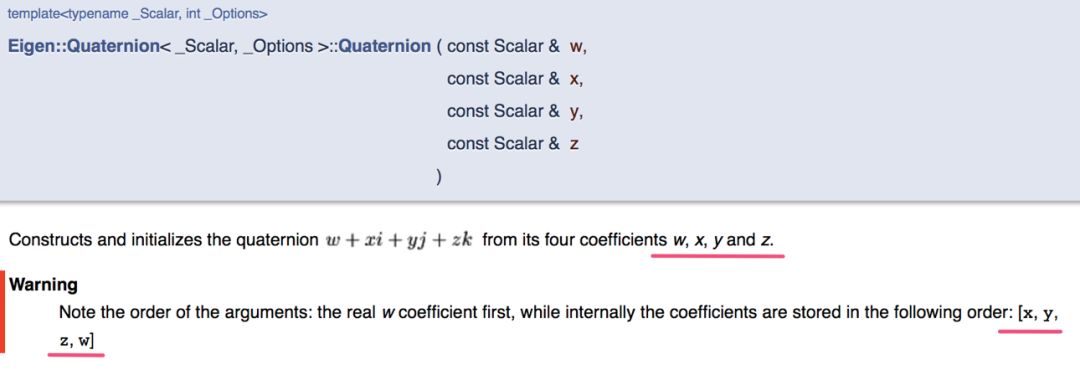
其次,单位四元素才能描述旋转,所以四元素使用前必须归一化:q.normalize()。
1、用一个旋转轴n和旋转角θ来描述一个旋转,所以也称轴角。不过很明显,因为旋转角度有一定的周期性(360°一圈),所以这种表达方式具有奇异性。
2、从旋转向量到旋转矩阵的转换过程称为 罗德里格斯公式。这个推导比较麻烦,否则也不会有一个专属的名字了。OpenCV和MATLAB中都有专门的罗德里格斯函数。
3、旋转向量本身没什么出彩的,不过旋转向量和旋转矩阵的转换关系,其实对应于李代数和李群的映射,这对于后面理解李代数很有帮助。
1、把一次旋转分解成3次绕不同坐标轴的旋转,比如航空领域经常使用的“偏航-俯仰-滚转”(yaw,pitch,roll)就是一种欧拉角。该表达方式最大的优势就是直观。
2、欧拉角在SLAM中用的很少,原因是它的一个致命缺点:万向锁。也就是在俯仰角为±90°时,第一次和第3次旋转使用的是同一个坐标轴,会丢失一个自由度,引起奇异性。事实上,想要表达三维旋转,至少需要4个变量。
了解了四种旋转的表达方式,那么编程时如何使用呢?
矩阵线性代数运算库Eigen
事实上,上述几种旋转的表达方式在一个第三方库Eigen中已经定义好啦。Eigen是一个C++开源线性代数库,安装非常方便,Ubuntu下一行代码即可搞定:
sudo apt-get install libeigen3-dev
Eigen在SLAM编程中是必备基础,必须熟练编程。关于Eigen,主要有以下几点需要强调或注意。
1、Eigen库不同于一般的库,它只有头文件,没有.so和 .a那样的二进制库文件,所以在CMakeLists.txt里只需要添加头文件路径,并不需要使用 target_link_libraries 将程序链接到库上。
2、Eigen以矩阵为基本数据单元,在Eigen中,所有的矩阵和向量都是Matrix模板类的对象,Matrix一般使用3个参数:数据类型、行数、列数
Eigen::Matrix<typename Scalar, int rowsNum, int colsNum>
而向量只是一种特殊的矩阵(一行或者一列)。同时,Eigen通过typedef 预先定义好了很多内置类型,如下,我们可以看到底层仍然是Eigen::Matrix
typedef Eigen::Matrix<float, 4, 4> Matrix4f;
typedef Eigen::Matrix<float, 3, 1> Vector3f;
3、为了提高效率,对于已知大小的矩阵,使用时需要指定矩阵的大小和类型。如果不确定矩阵的大小,可以使用动态矩阵Eigen::Dynamic
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> matrix_dynamic;
4、Eigen在数据类型方面“很傻很天真”。什么意思呢?就是使用Eigen时操作数据类型必须完全一致,不能进行自动类型提升。比如C++中,float类型加上double类型变量不会报错,编译器会自动将结果提升为double。但是在Eigen中float类型矩阵和double类型矩阵不能直接相加,必须统一为float或者double,否则会报错。
5、Eigen除了空间几何变换外,还提供了大量矩阵分解、稀疏线性方程求解等函数,非常方便。学习Eigen最好的方式就是官网:
http://eigen.tuxfamily.org/dox/
有非常多的示例参考。
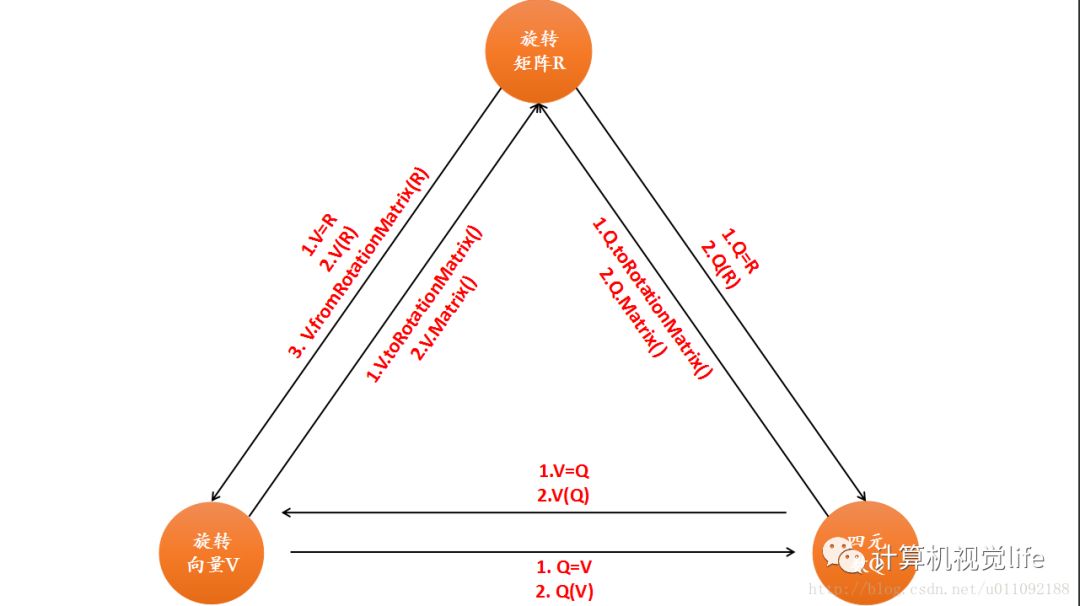
上述四种旋转表达方式是可以相互转化的。在Eigen中它们之间的转化非常的方便。下图是我看的别人总结的旋转矩阵、四元素、旋转向量之间的相互转化图:
作业
题目1:
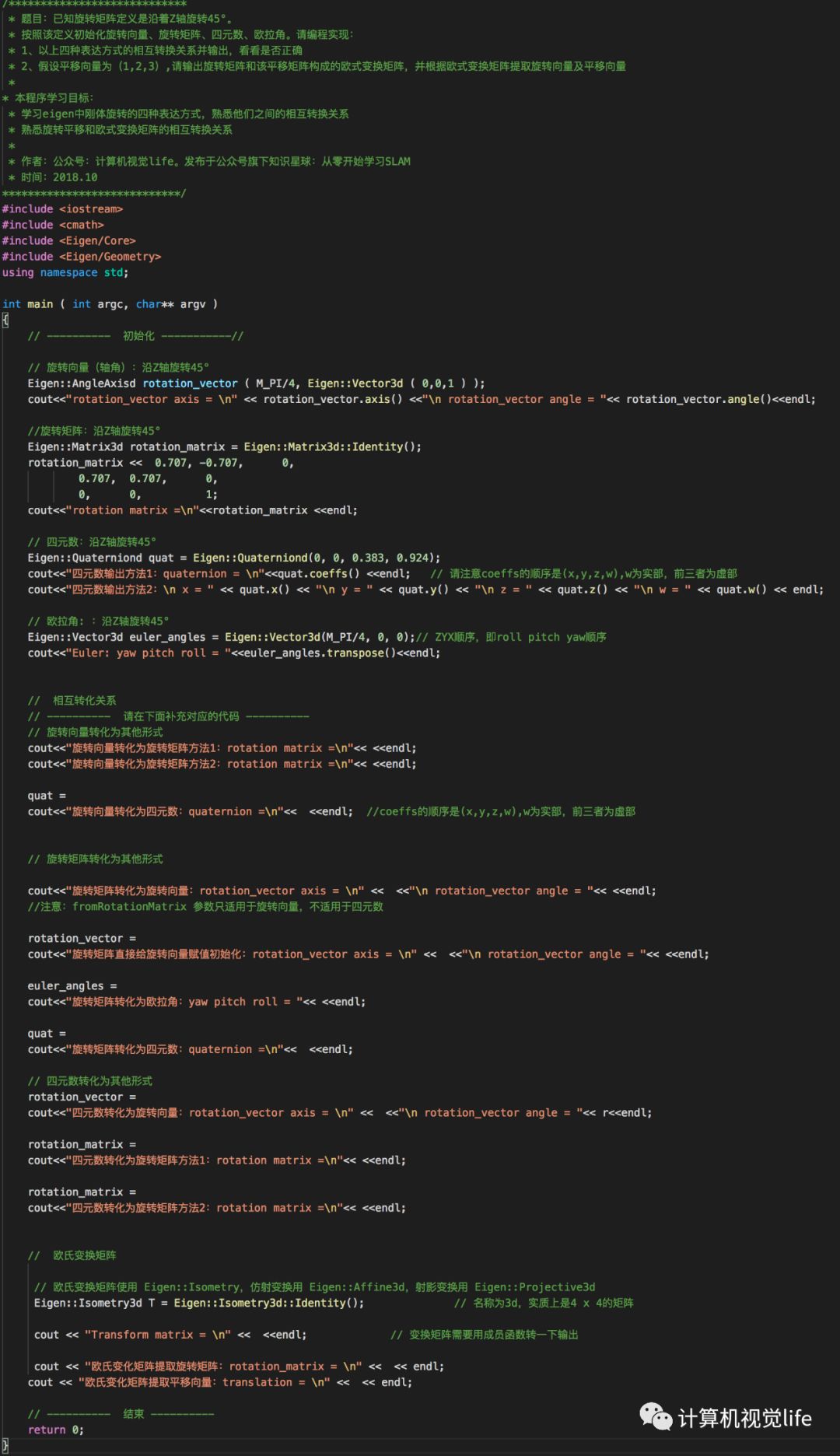
已知旋转矩阵定义是沿着Z轴旋转45°。请按照该定义初始化旋转向量、旋转矩阵、四元数、欧拉角。请编程实现:
1、以上四种表达方式的相互转换关系并输出,并参考给出的结果验证是否正确。
2、假设平移向量为(1,2,3),请输出旋转矩阵和该平移矩阵构成的欧式变换矩阵,并根据欧式变换矩阵提取旋转向量及平移向量。
本程序学习目标:
1、学习eigen中刚体旋转的四种表达方式,熟悉他们之间的相互转换关系
2、熟悉旋转平移和欧式变换矩阵的相互转换关系
以下是参考的编程框架:
题目2:
我们知道单位四元数q可以表达旋转。一个三维空间点可以用虚四元数p表示,用四元数 q 旋转点 p 的结果p'为:

证明:此时 p′ 必定为虚四元数(实部为零)。
公众号菜单栏回复:“旋转”,即可下载题目1代码框架和输出参考结果。
欢迎留言讨论,更多学习视频、文档资料、作业参考答案等扫描下方二维码进入知识星球「从零开始学习SLAM」和其他学习SLAM学的伙伴一起学习交流~

相关阅读