经验分享 | SLAM、3D vision笔试面试问题
点“计算机视觉life”关注,置顶更快接收消息!
本文作者已签DJI,点击文末阅读原文查看作者知乎

接着上次关于《2018年SLAM、三维视觉方向求职经验分享》的介绍,下面记录下之前笔试面试碰到的一些问题,有一些纯粹是瞎聊(这个有可能扛不住=_=)。由于时间有点久远,好些已经记不得了,再不记就要忘光了,往后憋毕设估计也没有心思整理了。只记问题~大部分网上都有答案,也可以参看第六部分。另外,因为我有些项目涉及机器学习、深度学习部分所以面试也有所涉及,这部分对于SLAM求职者来说没必要花费太多精力。
一:程序基础
二:数学基础
三:SLAM
四:传统图像处理
五:机器学习以及深度学习
六:参考资料
一:程序基础
考察C++、数据结构
多线程的了解
stl有什么?
vector扩充方式,size与capacity区别
顺序存储结构有哪些?
左值引用与右值引用
map与unordered map区别
const与static、const在函数前与函数后区别
虚函数与纯虚函数区别,虚函数关键字
函数memcpy 、memset的实现,手撕代码
一行代码求平方根
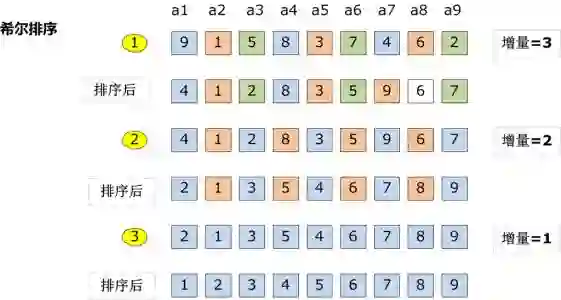
各种排序时间空间复杂度(快排,归并,桶排,堆排),手撕代码
二叉树排序、堆排序、希尔排序、桶排序时间复杂度(重要!因此重复)
最长公共子串、最长公共子序列,手撕代码
树的DFS与BFS、树的遍历,手撕代码
对于n个实例的k维数据,建立kd tree的时间复杂度
哈夫曼树带权路径长度、哈夫曼编码
长度为n的list,删除、插入与随机访问的计算复杂度
字符串子串数目
三维空间最近邻搜索的常用数据结构(八叉树、kd tree)
HashMap和Hashtable的比较
在一个二维数组中,每一行都按照从左到右递增的顺序排序,每一列都按照从上到下递增的顺序排序。请完成一个函数,输入这样的一个二维数组和一个整数,判断数组中是否含有该整数
10的答案(张同学的同学很给力)。放到10下面11就变成1了=_=,因此放到最后。
import math
print([n for n in range(2,X) if 0 not in [n%d for d in range(2,int(math.sqrt(n))+1)]])
如果import不算的话…
二:数学基础
考察概率论、线性代数、矩阵分析、数值优化
一层楼共有n级台阶,一次可以上至少一级但不超过m级台阶,求有多少种不同的上楼方案数。由于结果可能很大,你只需要输出结果对10007取模的值即可
拟合二维平面中的带噪声直线,其中有不超过20%的样本点远离了直线,另外80%的样本点可能有高斯噪声的偏移,要求输出为ax+by+c=0的形式,其中a>0且a^2+b^2=1
切比雪夫不等式、协方差与相关系数、各种分布、多元高斯分布
线性回归推导回归系数(y=kx,y=kx+b)
甲乙两人约好在某地碰面,时间段为10点到11点。若甲先到,最多会等待10分钟,10分钟内乙未出现则离开;若乙先到,最多会等待15分钟,15分钟内甲未出现则离开,请问两人见面的概率是多少?
ABCDE5个人互相传球,由A开始第一次传球,经5次传球最后回到A的手上,其中A与B不会互相传球,C只会传给D,E不会传给C,共有多少种传球方法?
MLE、MAP和贝叶斯估计
MLE,MAP,EM 和 point estimation 之间的关系是怎样的?
如何求解Ax=b (非迭代Cholesky分解、QR分解,迭代)
最小二乘封闭解与迭代解的取舍
梯度下降法、牛顿法、GN、LM,推导、优缺点
如何判断点在多边形内
一阶、二阶优化,Jacobian、hessian矩阵
1000个数的阶乘,求有多少个0
递推法求数学期望,反证法,数学归纳法等
三:SLAM
这部分除了3D视觉基础会结合个人研究方向问,对于泛泛的问题尽量发散
landmark参数化方式、对比,逆深度参数化;点线面因子图优化
滤波+回环(Trifo-VIO)
outlier+鲁棒核、RANSAC
EKF更新方程
AR系统如何实现
介绍下VO
Gridmap(网格标0、1)给定起点和终点,求最优路径(A*或其他路径规划算法)
相似变换、仿射变换、射影变换的区别
E和F的区别,自由度计算
单应矩阵H的求取
PNP算法、ICP算法(二维码、手眼标定)
闭环检测常用方法(orb、lsd、深度学习)
单目的初始化(拓展:双目,RGBD,VIO的初始化及传感器标定),其他:
https://github.com/frobelbest/GSLAM
简述一下Bundle Adjustment的过程
SVO、LSD中深度滤波器原理
说一说某个SLAM框架的工作原理(svo、orb、lsd)及其优缺点,如何改进?
RANSAC的框架
位姿不同表示间的相互转化、旋转矩阵特征值和特征向量物理意义
真实世界到相机照片的变换可看成射影变换
直接法与特征点法的优缺点对比
常见滤波方法的对比(KF、EKF、IEKF、UKF、PF)
双目测距范围Z=fb/d。问题: 640*480,fov=90°,zmax=10m,最小视差为2,求使zmax稳定的最小基线长度(6.25cm)
特征点法与直接法误差模型、Jacobian推导
光流的假设、仿射变换、4种方法,svo采取的方法,优势何在
MSCKF与ROVIO、MSCKF与预积分
边缘化方式原理
grid_map
https://github.com/ANYbotics/grid_map
四:传统图像处理
图像平滑算子、边缘检测算子
图像去噪滤波算法(高斯、均值、双边、Guide filter)
三个度量patch相似度的方法(SSD、SAD、NCC)
二进制描述子
计算描述子距离函数
描述一下SIFT或者SURF特征检测、匹配
SIFT的4个不变性
特征点、描述子ORB、SIFT、SURF、BRIEF等等 。geometric invariance:平移,旋转,尺度……; photometric invariance:亮度,曝光……
Mat实现、Mat类指针引用复制函数
颜色直方图统计,手撕代码
形态学操作,手撕代码
积分图,手撕代码
连通区域算法,给二值图,求出最大联通区域(用深度优先和广度优先算法,手撕代码)
Mser、Swt检测
图像分割(Grabcut)
目标跟踪(相关滤波KCF)
五:机器学习以及深度学习
这部分会很随意,根据项目
IOU、NMS,手撕代码
Kmeans伪代码
SVM的优缺点
随机森林的训练过程
优化方法SGD、Batch GD、Adadelta、Momentum对超参数的敏感程度
CNN中feature map维度计算、图中每一个特征点在原图的感受野大小
Segmatch
目标分割、目标检测(one stage、two stage),YOLO三代的发展,小目标检测
模型压缩与加速 mobilenet v1、mobilenet v2、shufflenet
https://github.com/memoiry/Awesome-model-compression-and-acceleration
六:参考资料
大疆算法工程师笔试(计算机视觉部分)
https://wenku.baidu.com/view/9aacf48ea21614791611282a.html
网易3D视觉方向
https://www.nowcoder.com/test/10780247/summary
谢晓佳学长“SLAM求职经验帖”
http://paopaorobot.org/bbs/read.php?tid=87&fid=7
http://paopaorobot.org/bbs/read.php?tid=88&fid=7
VO、SLAM、VIO基础论文
VO
rpg.ifi.uzh.ch/visual_o
《VO_Part_I_Scaramuzza》、《VO_Part_II_Scaramuzza》
光流
《Lucas-Kanade 20 Years On: A Unifying Framework》
图优化SLAM
《A Tutorial on Graph-Based SLAM》
《g2o: A General Framework for Graph Optimization》
参数化
《Impact of Landmark Parametrization on Monocular EKF-SLAM with Points and Lines》
边缘化
《Null-Space-based Marginalization》
VIO
《Quaternion kinematics for the error-state Kalman filter》
《Information Sparsification in Visual-Inertial Odometry》
其他常见SLAM、VIO系统相关论文(结合自己研究方向)
综述性质论文
下面第一篇论文总结了如下几点,感觉总结的很好
数据关联
初始化
位姿估计
地图生成
地图维护
失效恢复
回环检测
《Keyframe-based monocular SLAM: design, survey, and future directions》
《Past, Present, and Future of Simultaneous Localization And Mapping: Towards the Robust-Perception Age》
《Visual Place Recognition: A Survey》
《Simultaneous Localization and Mapping: A Survey of Current Trends in Autonomous Driving》
《Visual SLAM and Structure from Motion in Dynamic Environments: A Survey》
《A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots》
《GSLAM: A General SLAM Framework and Benchmark》
https://github.com/zdzhaoyong/GSLAM
《Survey on Computer Vision for UAVs: Current Developments and Trends》
《Semantic mapping for mobile robotics tasks: A survey》
《A Review on Deep Learning Techniques Applied to Semantic Segmentation》
《Deep Learning for Generic Object Detection: A Survey》
轨迹评估算法
https://github.com/MichaelGrupp/evo
https://github.com/raulmur/evaluate_ate_scale
ROVIO
SVO
《A Tutorial on Quantitative Trajectory Evaluation for Visual(-Inertial) Odometry》
VO、SLAM、VIO参考书籍
《SLAM十四讲》、《因子图在SLAM中的应用》
《state estimation for robotics》
《An Invitation to 3D Vision》、《Multi View Geometry》
深度学习参考
《解析卷积神经网络——深度学习实践手册》 lamda.nju.edu.cn/weixs/
《神经网络与深度学习》 nndl.github.io/
Shirley Snow 刘同学总结
https://zhuanlan.zhihu.com/p/42807023
《AI算法工程师手册》
https://zhuanlan.zhihu.com/p/63638229
推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
深度学习遇到SLAM | 如何评价基于深度学习的DeepVO,VINet,VidLoc?
新型相机DVS/Event-based camera的发展及应用

觉得有用,给个在看啦~