酱专访 | 狒特科技周恺弟:何必执着于SLAM,定位追踪你有更多选择
↑ ↑ ↑ 关注AR酱,
和我们一起发现闪闪发光的AR从业者!
河马酱
到北京啦,快来勾搭
空间中运动追踪一直是AR、VR中的大问题,沉浸感和真实体验除了是视觉上的完美融合,更是让你能够感受到和现实世界里一样的自由移动和行走,因此准确的定位定姿是很多公司努力的方向,今天我们AR酱专访狒特科技创始人周恺弟,来了解他们的星图运动追踪系统。
星图运动追踪系统

狒特科技产品名为“星图运动追踪系统”,据介绍,这套系统采用光学和惯性组合进行定位定姿,可以低成本提供高精度(2mm、0.02deg)、低延时(4ms)、大范围(不限)的三维位置和三维姿态信息。
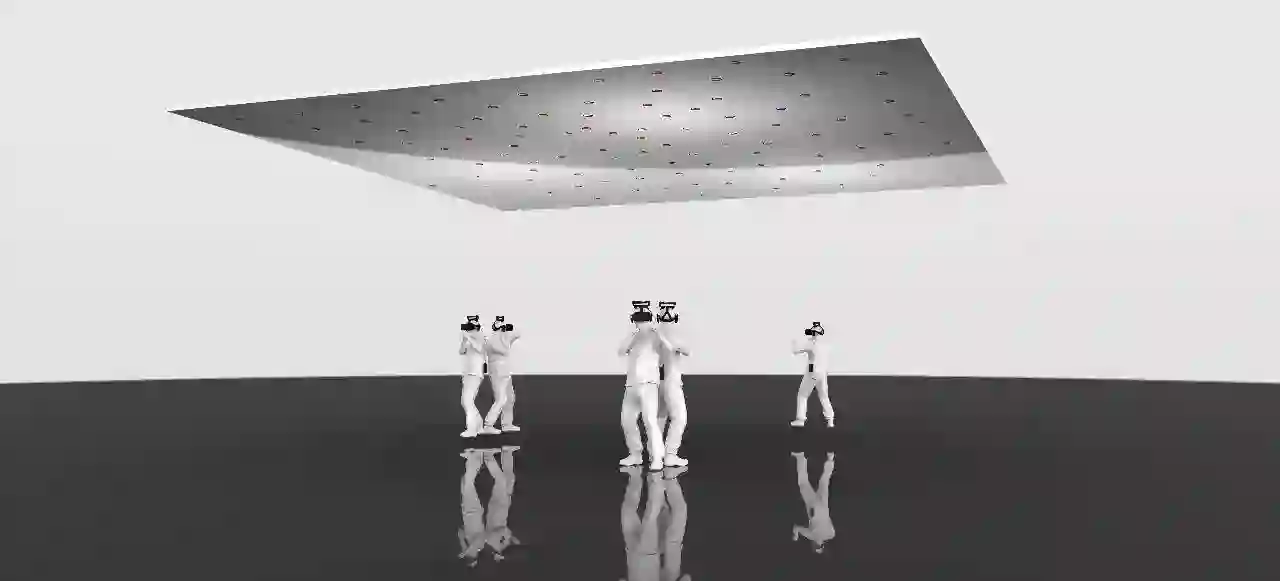
星图运动追踪系统主要包括近似隐形标记点(半径1cm)、硬件(云台和摄像头)和运动追踪算法三大部分。标记点是一些半径1cm的反光贴纸,使用时用户随机将其贴附在运动范围内头顶上方的天花板上,用户在体验AR/VR过程中,将红外摄像头、IMU传感器和云台组成硬件置于头显顶部,摄像头捕捉在环境中随意部署的标记点,通过光学定位算法获得高精度、低延时的位姿信息,通过光学定位算法获得高精度、低延时的位姿信息,因为目前相机的FOV约60°,一平米大概需要5个反光点。
为了满足移动设备的需求,狒特科技还配备了一个小型模块,可通过wifi、蓝牙、数据线等方式与移动端头显链接,来完成定位数据数据处理。
一种折中的方案
周恺弟向AR酱介绍,追踪定位的方案,尤其是通过光学方式来定位,现在已经有比较清晰的技术方案。
outside-in的方案,例如HTC 采用的Lighthouse激光扫描定位技术,通过基站上的激光传感器识别佩戴者佩戴的机身上的位置追踪传感器,从而获得位置和方向信息,再如OptiTrack通过架设多个摄像头来捕捉运动物体身上的标记点来算出姿态,而近年来最受追捧的则是inside-out的SLAM (simultaneous localization and mapping),通过移动物体自身的传感器或者摄像头去识别外部环境,通过环境变化结合算法来判断自身的姿态和位置的改变。星图的方案也属于inside-out,而它和SLAM的差别在于,SLAM识别的是外界的自然特征,而星图识别的是人造特征,也就是空间中分布的反光点。
针对几个不同的方案,周恺弟还为我们进行了对比:
设备
定位系统中设备分为基础设施和终端。outside-in的方案如lighthouse和optitrack中提前在环境中架设基站或者是搭建摄像头就是基础设施,被追踪物体如arvr设备就是终端,终端上需要有接收器,例如HTC Vive中使用头盔和手柄上有超过70个光敏传感器,而OptiTrack的追踪物体则会贴上小球。SLAM则相对轻松,不需要任何基础设施,但是需要终端比较强大,终端需要配备了多个摄像头、传感器和强大的计算资源。而星图的方案需要把摄像头+IMU+云台的硬件固定在头显上作为终端,再就是一些小小的反光贴纸贴在天花板上作为基础设施。
成本
outside-in方案中环境的部署与场地的面基有关,随着场地增加设备数量随之增加,成本不容小觑,而SLAM表示,没有压力,一个设备走天下,星图的成本基本不随使空间面积改变而增加,面积大了就多贴贴纸,贴纸反正也不贵。
灵活性
因为场地部署搭建,outside-in的方案灵活性受限制,通常是在固定场所使用,而SLAM则表现出更大的自由度,在固定场所使用星图相比摄像机和基站更容易部署,贴纸近乎隐形,不会影响场地的外观,硬件体积并不大,外出携带也算便利,不过前提是有天花板。
稳定性及精度
outside-in的方案,一旦部署完成,则可以保证很好的稳定性,而为了保证精度,需要把接收器做大、做分散以保证准确的定姿;而SLAM由于是做自然识别,自然特征如果有所改变会引起地图变化,因此现在的SLAM每次使用都需要进行扫描,同时足够的自然特征和充足稳定的光线也会影响稳定性,并且自然特征提取匹配很难精确,其中的误差是累计的,SLAM使用中通常要做闭环检测和控制,目前的大多数slam系统这种误差是移动距离的1%左右,虽然现在大家都很努力提升精度,但误差仍是厘米级,而星图方案因为将自然特征变为人为特征,并且固定了,所以稳定性更高,红外摄像头也避免了光线的影响,同时他们头部的模块配备了云台,能够让摄像头更加稳定,能够精准识别扫描点,将误差控制在2mm内。
运算和功耗
outside-in方案因为在硬件和布置基础设施上良苦用心,因此在算法上可以省去一些力气,而SLAM则因为复杂多变的环境,面临更大的挑战,每次使用建模都是对运算和功耗的考验,目前的AR设备单纯的显示已经有很大的功耗,而SLAM这强BUFF一加,压力更大,星图的方案则恰好介于两者之间,一个摄像头去感受外部信息相比outside-in的方案有点累,但是识别特征点却比识别自然特征轻松不止一点,功耗也更低。
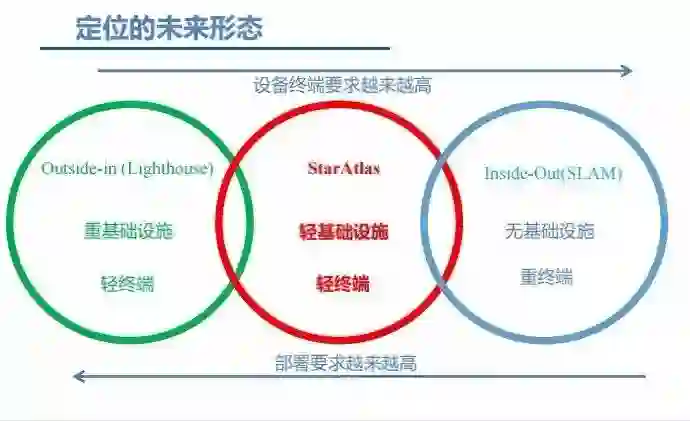
综合以上方面,用周恺弟的话来说,outside-in属于重基础设施轻终端,SLAM属于无基础设施重终端,而星图方案则是轻基础设施轻终端介于两者之间,大家各有侧重。
多一个选择,而不是替代
对于这这种介乎两者之间的方案,我不禁好奇,这个尴尬的中间地带会不会只是短期内的过渡品。
周恺弟告诉我们,在他们团队看来,outside-in方案更适合B端市场,尤其是新一代的lighthouse技术,可以无限扩展,并且像gps一样不限制定位终端数目,对于商家来说场所固定体验稳定,搭建和成本不是太大问题,而SLAM因为灵活和低门槛,更适合用在营销或者轻体验中使用,比如POKEMON GO这样的游戏,而狒特科技要做的是提供C端用户的家庭定位追踪服务,通常是相对固定的场所,相对低廉的成本,并且不破坏场地外观,无论是卧室、客厅,更换场地也不会麻烦。三者之间是不冲突的,有着不同的市场定位。
其次,从现实来看,Lighthouse新一代要年底才能出来,量产可能需要明年,,而SLAM暂时还没有成熟的方案,“slam对计算资源要求太高,虽然随着摩尔定律计算能力可以提高,但是目前已经到了瓶颈,功耗上来说,电池这块也没有太多突破,slam需要反复提取匹配特征并建地图,精度和稳定性理论上是存在缺陷”,在他们看来,其实目前的性价比之选就是星图,“用marker来代替feature,最后让marker尽量趋近于markless——标记贴了就像没贴一样,人工标记又高校又准确,为什么非要用slam炫酷和炫技呢”。而且如果将摄像头FOV提升,降低对标记点密度要求等,或许这套方案能具备更大的潜力和空间。
其实,星图为代表的这类方案被统称为天花板定位,国内外有很多公司在做这种方案的应用和产品,例如我们曾写过的StarTracter,就把它运用到电视直播中,给画面加实时的特效,再如战斗机头瞄系统中也采用类似方案来准确定位驾驶员头部位置。而狒特科技的星图特点在于除了算法,他们还努力把marker变成markless,力求让标记点隐形,他们还在尝试把产品小型化,甚至模块化,以更好的配合AR、VR设备。
目前这款产品开发者版本已经在售,“是为了让开发者知道,他们还有这样一个高性价比的选择”。
关于团队
像很多创业者一样,周恺弟不是一个没有故事的男同学。2015年下旬,决定做定位追踪之后,研一的周恺弟和小伙伴们投入了研发,初期为了筹得资金他们参加了很多比赛,各类奖金拿到了近百万,,15年项目启动就休学了为了更好的创业他决定休学,16年中间公司还拿到了天使。当我问他休学还会继续回去念吗,他告诉我,“为了公司的发展,书还是会读的”。
狒特科技的创始团队里还有北大和北航的博士,大家都是计算机软件等专业,其实这些高校和专业也都是他们同行的出处,周恺弟感慨“校友师兄很多,做定位还是挺多,也经常也遇到同行,不过也没什么好竞争的,市场还没起来,交互比较核心没解决,早期大家都属于探索状态,不能像老中医一样,感觉自己有啥祖传秘方捂着不和大家说,大家也都是敞开心扉互相交流,我们很多公司交流紧密”。
想知道狒特科技的星图运动追踪系统哪里买?
快去我们AR酱刚刚上线的科技小铺逛逛吧!
产品入驻小铺,联系微信号18521503035

AR酱原创,转载务必注明
转自微信号AR酱(ARchan_TT)
并附上原文链接
阅读推荐

“呐,做 AR VR,最重要的就是开心啦”
梦想重要,开心也重要
当你有有趣的想法时,也要来AR酱上
和我们一起分享啊

关注一下好不好





