点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
来源丨https://zhuanlan.zhihu.com/p/404326817
本篇主要介绍LOAM代码中有关lidar odometry部分对应的公式推导。包含特征点曲率计算公式,点到线和面距离求取公式,里程计优化求解公式以及一些坐标变换公式。LOAM代码版本为
https://github.com/laboshinl/loam_velodyne
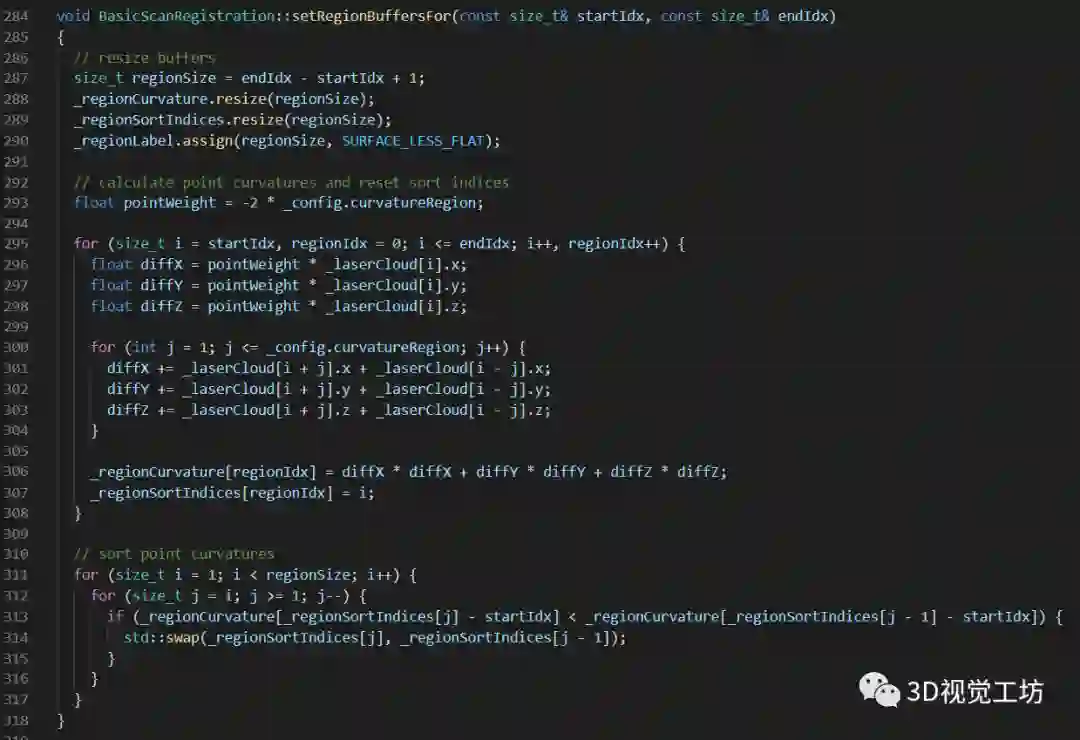
该部分代码通过求取diffX * diffX + diffY * diffY + diffZ * diffZ 来近似表示曲率,通过曲率的大小来划分是角点和平面点。其中 _config.curvatureRegion 设为5,表示取该点左右各5个点作为邻域范围来求取曲率。因此pointWeight = -2 * _config.curvatureRegion = -10,带入循环公式中变为:
diffX = -10*_laserCloud[i].x + _laserCloud[i+1].x + _laserCloud[i-1].x + _laserCloud[i+2].x + _laserCloud[i-2].x + … + _laserCloud[i+5].x + _laserCloud[i-5].x
diffX =(_laserCloud[i+1].x - _laserCloud[i].x)+ (_laserCloud[i-1].x - _laserCloud[i].x) + … + (_laserCloud[i+5].x - _laserCloud[i].x) + (_laserCloud[i-5].x - _laserCloud[i].x)
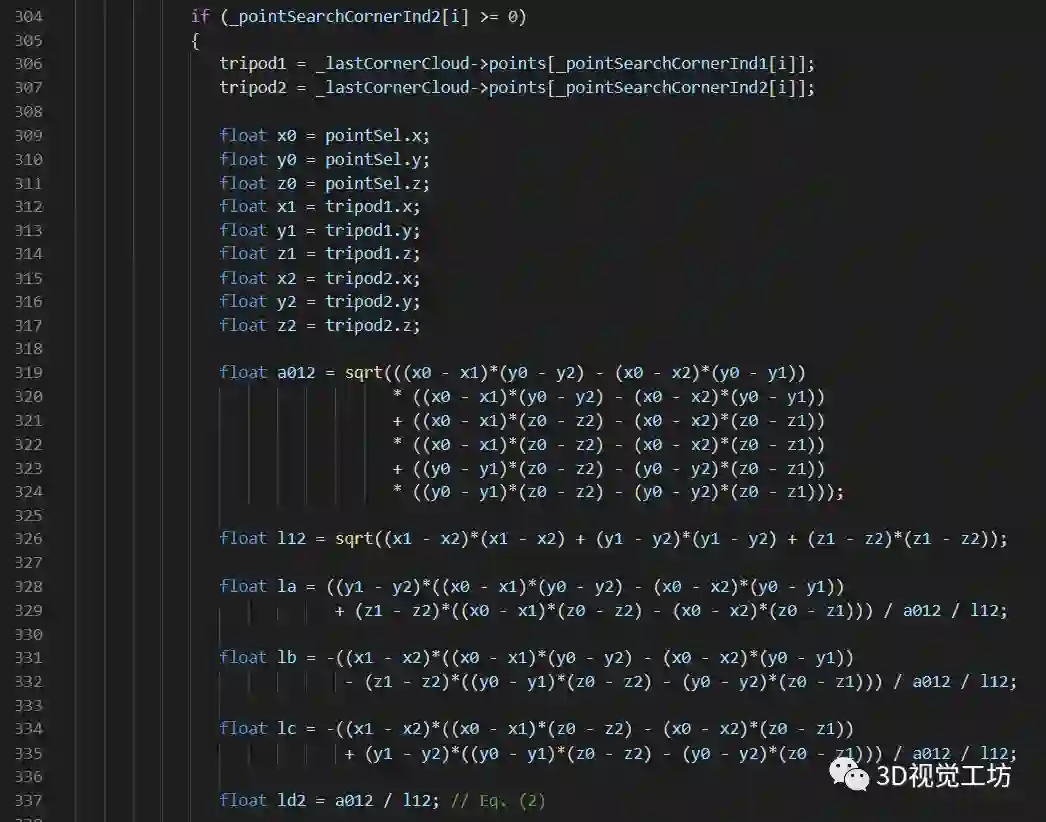
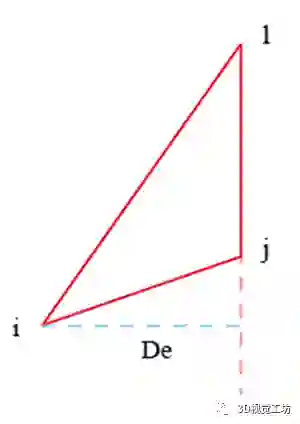
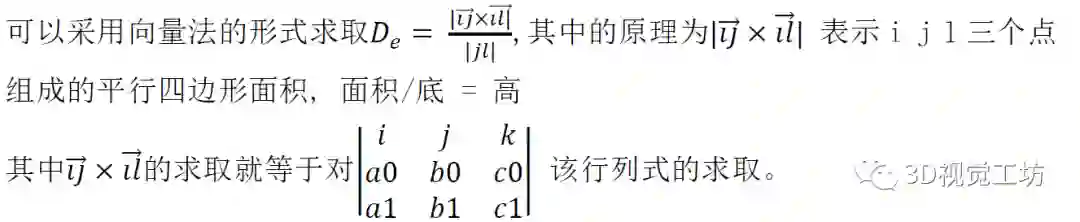
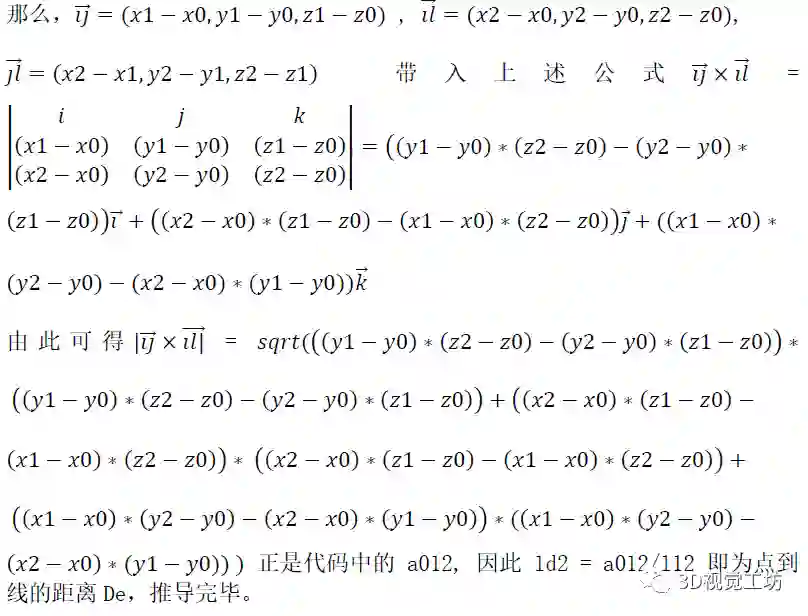
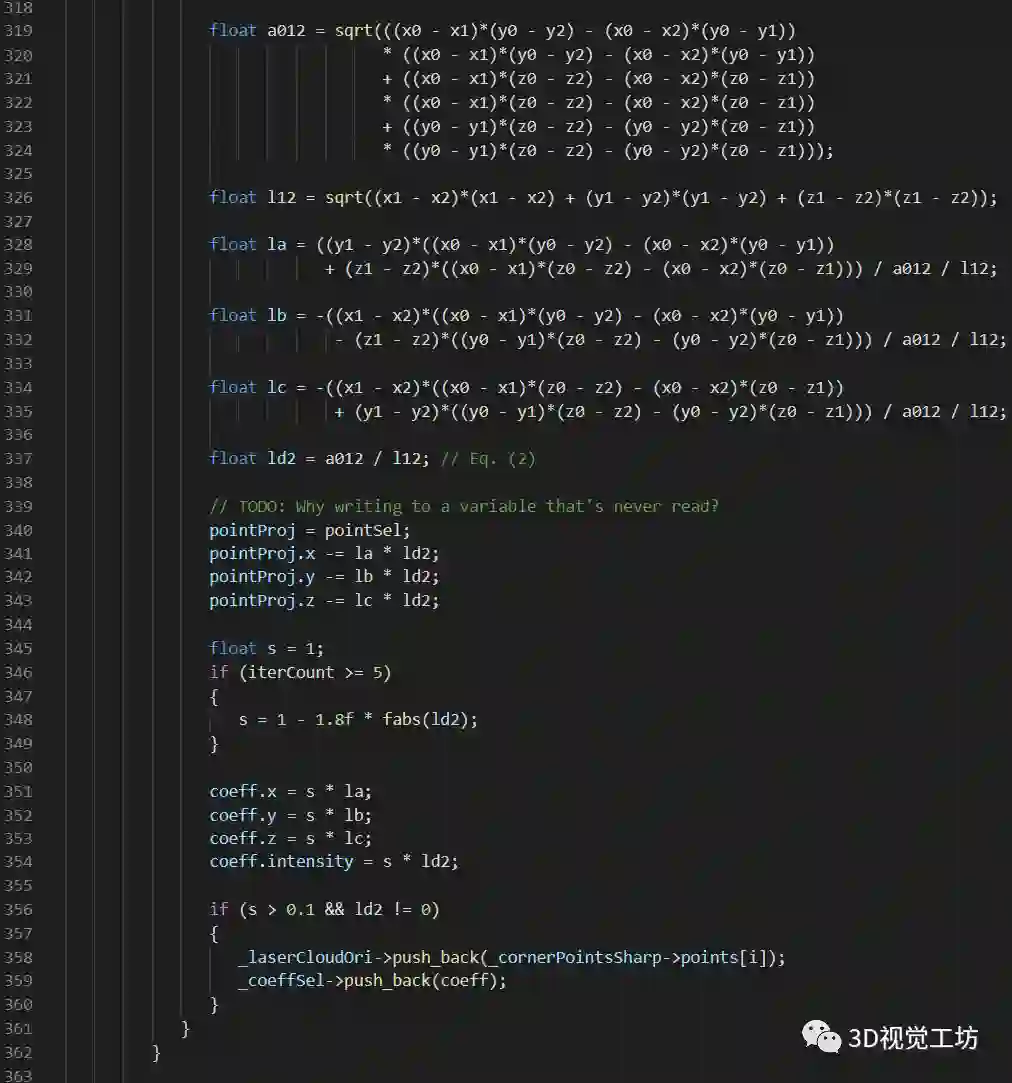
按照算法流程,需要根据提取的特征点,来建立点到线和点到面的约束关系即点到线的距离 和 点到面的距离最小。代码中求取两个距离的原理公式如下:
![]()
按照上述所讲内容,结合代码(x0,y0,z0)代表上图中i点坐标,(x1,y1,z1)和 (x2,y2,z2)分别代表 j 和 l 点坐标。
![]()
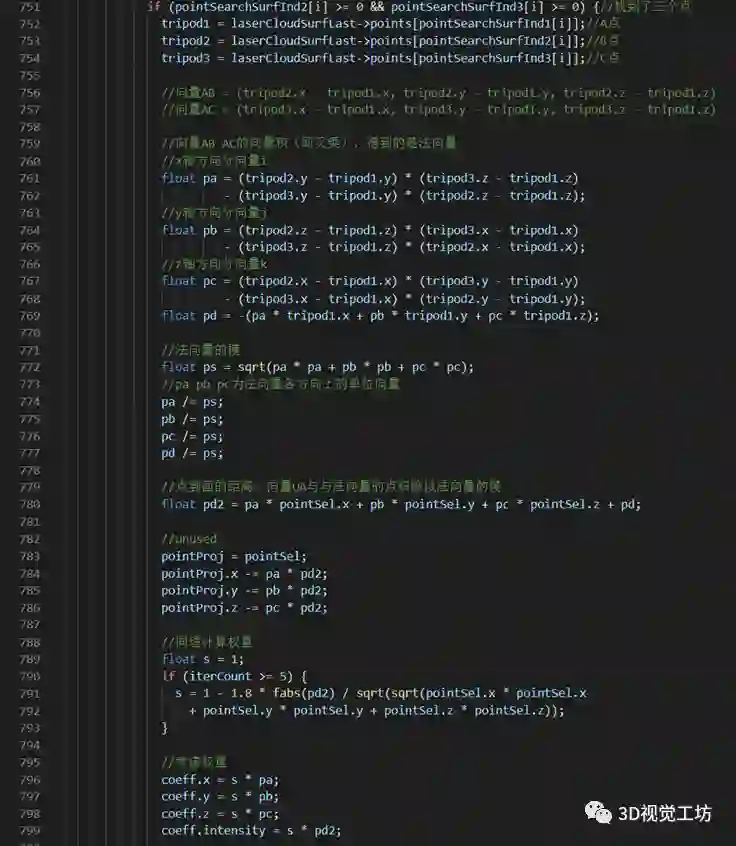
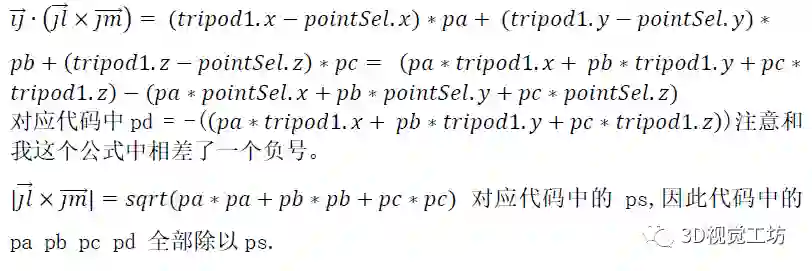
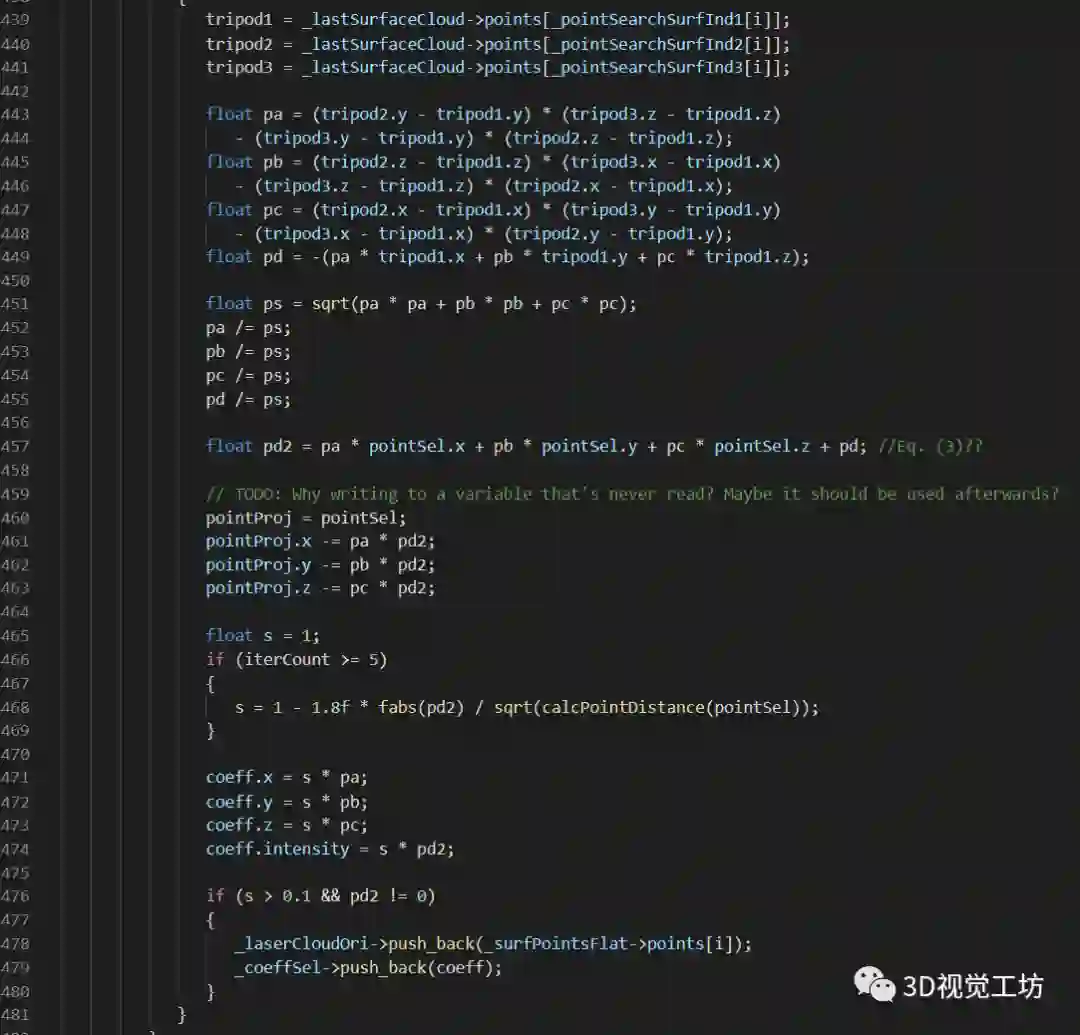
同理,点到面的距离也可以按照法向量的方式来求取,相关代码如下:
![]()
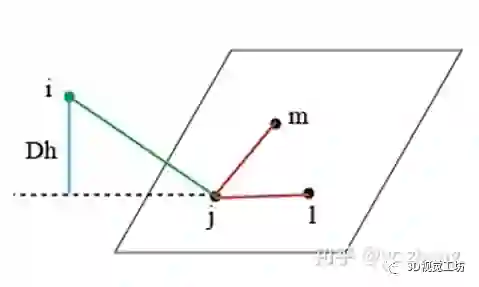
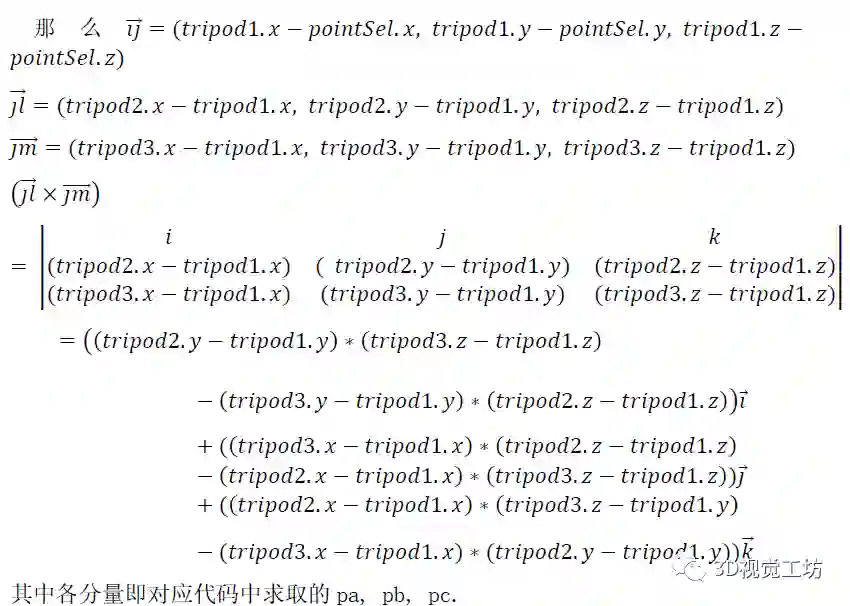
结合代码带入上述公式,i 点坐标为代码中的 (pointSel.x, pointSel.y, pointSel.z);j 点坐标为代码中的(tripod1.x, tripod1.y, tripod1.z);l点坐标为代码中的(tripod2.x, tripod2.y, tripod2.z);m 点坐标为代码中的(tripod3.x, tripod3.y, tripod3.z)。
![]()
![]()
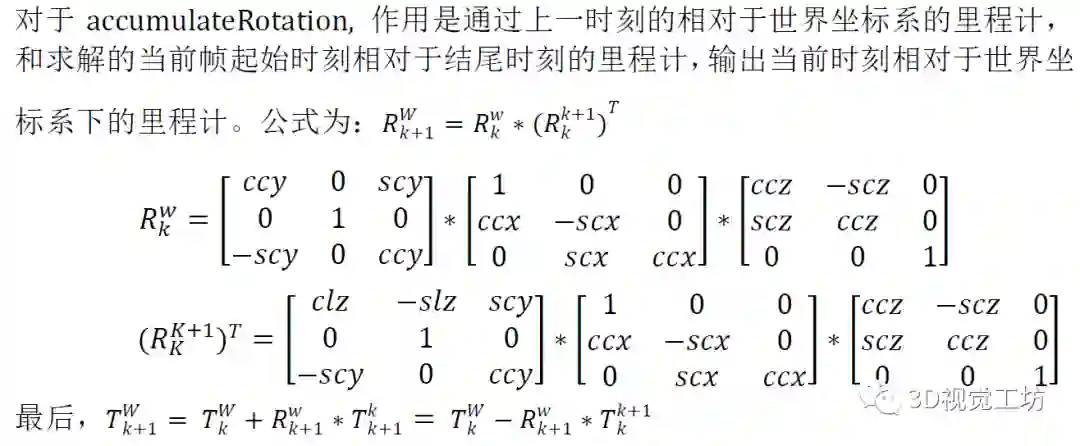
在进行里程计求解公式推导前,需要了解其中几个重用的坐标系转换。
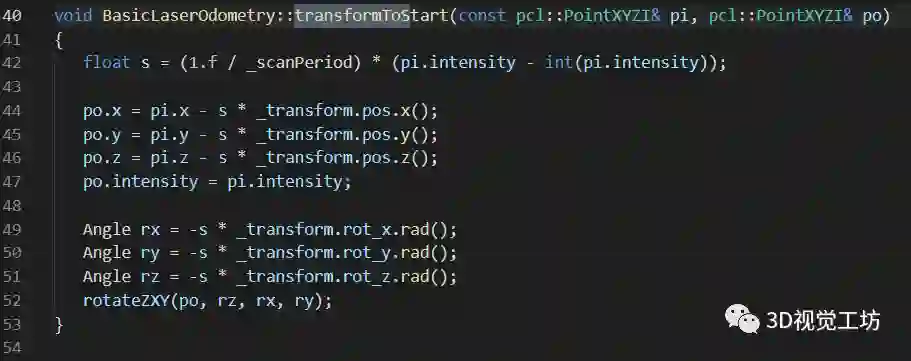
其中transformToStart 对应论文中的公式
![]() 注意LOAM代码中point.intensity在预处理时被存储为(scanID+relTime)
注意LOAM代码中point.intensity在预处理时被存储为(scanID+relTime)
![]()
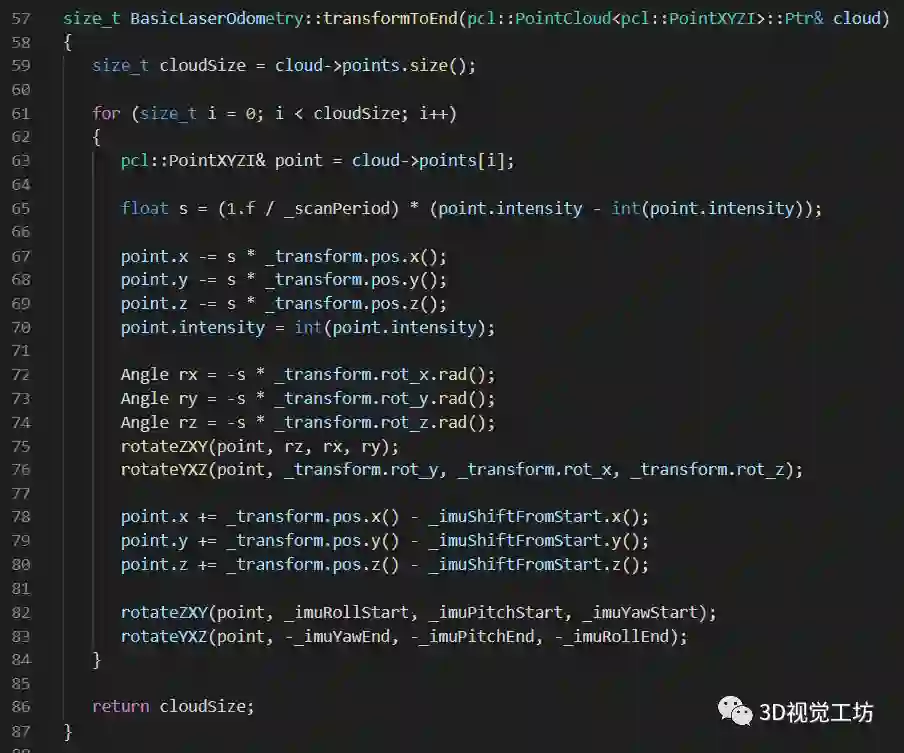
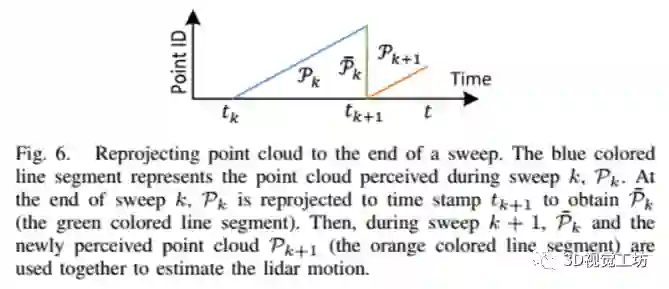
transformToEnd 函数中就是先做了transformToStart ,再将点云全部都转换到一帧的结束时刻。
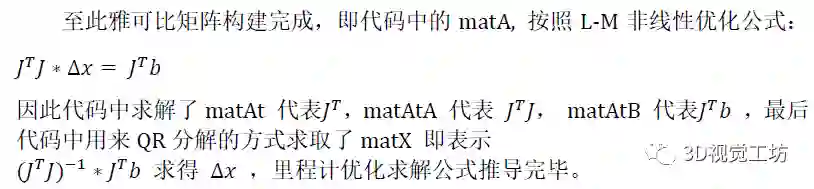
LOAM中利用建立点到线 和点到面的距离最小值来作为约束方程,最后利用L-M非线性优化方法来求解这个非线性问题。对于L-M方法,用到的公式如下:
![]()
首先直接建立约束方程的是已经坐标转换后的点云坐标即X
![]()
那么根据链式法则,我们就可以先通过约束方程对坐标进行求偏导,然后再乘以坐标对变换中的rotX求偏导,即可得到最终的偏导求取结果。
首先根据约束方程对坐标量求偏导,我们上文已经建立了约束方程。
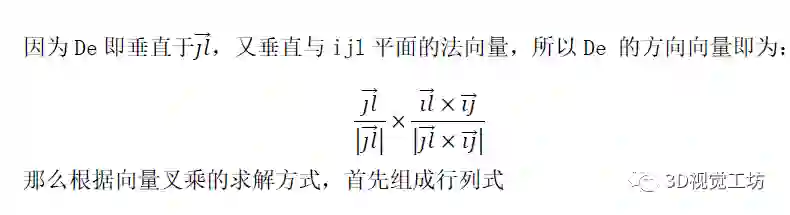
这里的la lb lc 就是点到线距离的函数对于X Y Z的偏导数,这里面可以通过导数的几何意义来理解,导数在几何意义上表示梯度。而梯度方向就是我们所求的距离函数的单位向量了,也就是下图的De 方向。
![]()
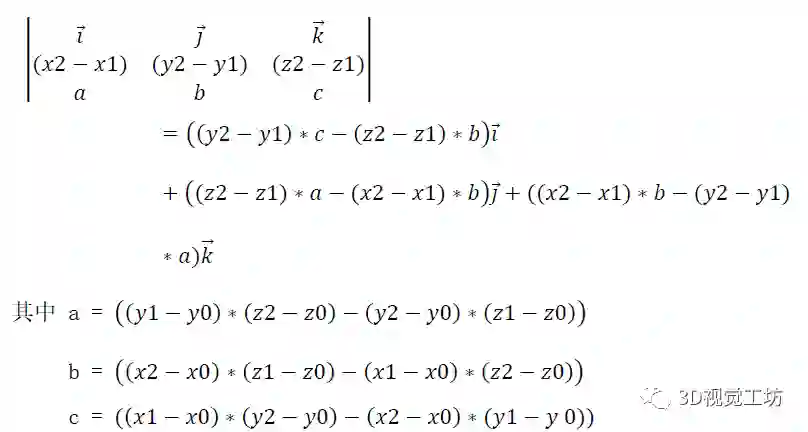
![]()
代入后就得到代码中的 la lb lc ,但这里推导的公式正负号也和代码中有所不同;同理,点到面约束方程求偏导也是按照此种方式求得。
![]()
![]()
![]()
以上具体内容可以关注本人“彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化”课程视频,具体课程介绍可以扫以下二维码:
独家重磅课程!
1、重磅来袭!基于LiDAR的多传感器融合SLAM 系列教程:LOAM、LeGO-LOAM、LIO-SAM
2、系统全面的相机标定课程:单目/鱼眼/双目/阵列 相机标定:原理与实战
3、视觉SLAM必备基础课程:视觉SLAM必学基础:ORB-SLAM2源码详解
4、深度学习三维重建课程:基于深度学习的三维重建学习路线
5、激光定位+建图课程:激光SLAM怎么学?手把手教你Cartographer从入门到精通!
6、视觉+IMU定位课程 视觉惯性里程计58讲教程全部上线!IMU预积分/残差雅克比推导、边缘化约束、滑窗BA!
7、手把手图像三维重建课程:系统学三维重建42讲全部上线!掌握稠密匹配、点云融合、网格重建、纹理贴图!
![]()
全国最棒的SLAM、三维视觉学习社区↓
![]()
技术交流微信群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群,请添加微信号 chichui502 或扫描下方加群,备注:”名字/昵称+学校/公司+研究方向“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com
![]()
扫描关注视频号,看最新技术落地及开源方案视频秀 ↓
![]()
— 版权声明 —
本公众号原创内容版权属计算机视觉life所有;从公开渠道收集、整理及授权转载的非原创文字、图片和音视频资料,版权属原作者。如果侵权,请联系我们,会及时删除。