实操教程|Pytorch - 弹性训练极简实现( 附源码)

极市导读
作者将以往抽象的分布式训练的概念以代码的形式展现出来,并保证每个代码可执行、可验证、可复现,并贡献出来源码让大家相互交流。本例中会先在Node0上启动4 GPU的worker group ,等其训练一段时间后,会在Node1上再启动4 GPU的workers,并与Node1上的workers构成一个新的worker group,最终构成一个2机8卡的分布式训练。>>加入极市CV技术交流群,走在计算机视觉的最前沿
由于工作需要,最近在补充分布式训练方面的知识。经过一番理论学习后仍觉得意犹未尽,很多知识点无法准确get到(例如:分布式原语scatter、all reduce等代码层面应该是什么样的,ring all reduce 算法在梯度同步时是怎么使用的,parameter server参数是如何部分更新的)。
著名物理学家,诺贝尔奖得主Richard Feynman办公室的黑板上写了:"What I cannot create, I do not understand."。在程序员界也经常有"show me the code"的口号。因此,我打算写一系列的分布式训练的文章,将以往抽象的分布式训练的概念以代码的形式展现出来,并保证每个代码可执行、可验证、可复现,并贡献出来源码让大家相互交流。
经过调研发现pytorch对于分布式训练做好很好的抽象且接口完善,因此本系列文章将以pytorch为主要框架进行,文章中的例子很多都来自pytorch的文档,并在此基础上进行了调试和扩充。
最后,由于分布式训练的理论介绍网络上已经很多了,理论部分的介绍不会是本系列文章的重点,我会将重点放在代码层面的介绍上面。
Pytorch - 分布式训练极简体验:https://zhuanlan.zhihu.com/p/477073906
Pytorch - 分布式通信原语(附源码):https://zhuanlan.zhihu.com/p/478953028
Pytorch - 手写allreduce分布式训练(附源码):https://zhuanlan.zhihu.com/p/482557067
Pytorch - 算子间并行极简实现(附源码):https://zhuanlan.zhihu.com/p/483640235
Pytorch - 多机多卡极简实现(附源码):https://zhuanlan.zhihu.com/p/486130584
1. 介绍
Pytorch在1.9.0引入了torchrun,用其替代1.9.0以前版本的torch.distributed.launch。torchrun在torch.distributed.launch 功能的基础上主要新增了两个功能:
-
Failover: 当worker训练失败时,会自动重新启动所有worker继续进行训练; -
Elastic: 可以动态增加或或删除node节点,本文将通过一个例子说明Elastic Training应该如何使用;
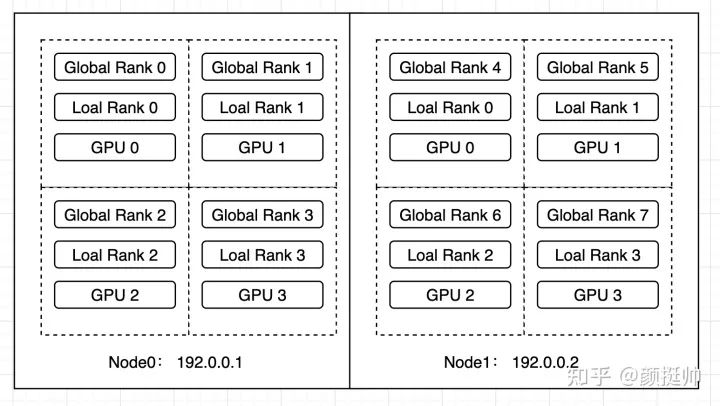
本例中会先在Node0上启动4 GPU的worker group ,等其训练一段时间后,会在Node1上再启动4 GPU的workers,并与Node1上的workers构成一个新的worker group,最终构成一个2机8卡的分布式训练。
2. 模型构建
一个简单的全连接模型神经网络模型
class ToyModel(nn.Module):
def __init__(self):
super(ToyModel, self).__init__()
self.net1 = nn.Linear(10, 10)
self.relu = nn.ReLU()
self.net2 = nn.Linear(10, 5)
def forward(self, x):
return self.net2(self.relu(self.net1(x)))
3. checkpoint 处理
由于再每次增加或删除node时,会将所有worker kill掉,然后再重新启动所有worker进行训练。因此,在训练代码中要对训练的状态进行保存,以保证重启后能接着上次的状态继续训练。
需要保存的信息一般有如下内容:
-
model :模型的参数信息 -
optimizer :优化器的参数信心 -
epoch:当前执行到第几个epoch
save和load的代码如下所示
-
torch.save:利用python的pickle将python的object 进行序列化,并保存到本地文件; -
torch.load: 将torch.save后的本地文件进行反序列化,并加载到内存中; -
model.state_dict():存储了model 每个layer和其对应的param信息 -
optimizer.state_dict():存储了优化器的参数信信息
def save_checkpoint(epoch, model, optimizer, path):
torch.save({
"epoch": epoch,
"model_state_dict": model.state_dict(),
"optimize_state_dict": optimizer.state_dict(),
}, path)
def load_checkpoint(path):
checkpoint = torch.load(path)
return checkpoint
4. 训练代码
初始化逻辑如下:
-
1~3行: 输出当前worker的关键环境变量,用于后面的结果展示 -
5~8行:创建模型、优化器和损失函数 -
10~12行:初始化参数信息 -
14~19行:如果存在checkpoint,则加载checkpoint,并赋值给model、optimizer和firt_epoch
local_rank = int(os.environ["LOCAL_RANK"])
rank = int(os.environ["RANK"])
print(f"[{os.getpid()}] (rank = {rank}, local_rank = {local_rank}) train worker starting...")
model = ToyModel().cuda(local_rank)
ddp_model = DDP(model, [local_rank])
loss_fn = nn.MSELoss()
optimizer = optim.SGD(ddp_model.parameters(), lr=0.001)
optimizer.zero_grad()
max_epoch = 100
first_epoch = 0
ckp_path = "checkpoint.pt"
if os.path.exists(ckp_path):
print(f"load checkpoint from {ckp_path}")
checkpoint = load_checkpoint(ckp_path)
model.load_state_dict(checkpoint["model_state_dict"])
optimizer.load_state_dict(checkpoint["optimize_state_dict"])
first_epoch = checkpoint["epoch"]
训练逻辑:
-
1行:epoch执行的次数为first_epoch到max_epoch,以便能够在worker被重启后继续原有的epoch继续训练; -
2行:为了展示动态添加node效果,这里添加sleep函数来降低训练的速度; -
3~8行:模型训练流程; -
9行:为了简单,文本每个epoch进行一次checkpoint保存;将当前的epoch,model和optimizer保存到checkpoint中;
for i in range(first_epoch, max_epoch):
time.sleep(1) # 为了展示动态添加node效果,这里添加sleep函数来降低训练的速度
outputs = ddp_model(torch.randn(20, 10).to(local_rank))
labels = torch.randn(20, 5).to(local_rank)
loss = loss_fn(outputs, labels)
loss.backward()
print(f"[{os.getpid()}] epoch {i} (rank = {rank}, local_rank = {local_rank}) loss = {loss.item()}\n")
optimizer.step()
save_checkpoint(i, model, optimizer, ckp_path)
5. 启动方式
由于我们使用torchrun来启动多机多卡任务,无需使用spawn接口来启动多个进程(torchrun会负责将我们的python script启动为一个process),因此直接调用上文编写的train函数,并在前后分别添加DistributedDataParallel的初始化和效果函数即可。
下面代码描述了上文train接口的调用。
def run():
env_dict = {
key: os.environ[key]
for key in ("MASTER_ADDR", "MASTER_PORT", "WORLD_SIZE", "LOCAL_WORLD_SIZE")
}
print(f"[{os.getpid()}] Initializing process group with: {env_dict}")
dist.init_process_group(backend="nccl")
train()
dist.destroy_process_group()
if __name__ == "__main__":
run()
本例中使用torchrun来执行多机多卡的分布式训练任务(注:torch.distributed.launch 已经被pytorch淘汰了,尽量不要再使用)。启动脚本描述如下(注:node0和node1均通过该脚本进行启动)
-
--nnodes=1:3:表示当前训练任务接受最少1个node,最多3个node参与分布式训练; -
--nproc_per_node=4:表示每个node上节点有4个process -
--max_restarts=3: worker group最大的重启次数;这里需要注意的是,node fail、node scale down和node scale up都会导致restart; -
--rdzv_id=1:一个unique的job id,所有node均使用同一个job id; -
--rdzv_backend: rendezvous的backend实现,默认支持c10d和etcd两种;rendezvous用于多个node之间的通信和协调; -
--rdzv_endpoint:rendezvous的地址,应该为一个node的host ip和port;
torchrun \
--nnodes=1:3\
--nproc_per_node=4\
--max_restarts=3\
--rdzv_id=1\
--rdzv_backend=c10d\
--rdzv_endpoint="192.0.0.1:1234"\
train_elastic.py
6. 结果分析
代码:BetterDL - train_elastic.py:https://github.com/tingshua-yts/BetterDL/blob/master/test/pytorch/DDP/train_elastic.py
运行环境: 2台4卡 v100机器
image: pytorch/pytorch:1.11.0-cuda11.3-cudnn8-runtime
gpu: v100
先在node0上执行执行启动脚本
torchrun \
--nnodes=1:3\
--nproc_per_node=4\
--max_restarts=3\
--rdzv_id=1\
--rdzv_backend=c10d\
--rdzv_endpoint="192.0.0.1:1234"\
train_elastic.py
得到如下结果
-
2~5行:当前启动的是单机4卡的训练任务,因此WORLD_SIZE为4, LOCAL_WORKD_SIZE也为4 -
6~9行:共有4个rank参与了分布式训练,rank0~rank3 -
10~18行: rank0~rank3 均从epoch=0开始训练
r/workspace/DDP# sh run_elastic.sh
[4031] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '44901', 'WORLD_SIZE': '4', 'LOCAL_WORLD_SIZE': '4'}
[4029] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '44901', 'WORLD_SIZE': '4', 'LOCAL_WORLD_SIZE': '4'}
[4030] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '44901', 'WORLD_SIZE': '4', 'LOCAL_WORLD_SIZE': '4'}
[4032] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '44901', 'WORLD_SIZE': '4', 'LOCAL_WORLD_SIZE': '4'}
[4029] (rank = 0, local_rank = 0) train worker starting...
[4030] (rank = 1, local_rank = 1) train worker starting...
[4032] (rank = 3, local_rank = 3) train worker starting...
[4031] (rank = 2, local_rank = 2) train worker starting...
[4101] epoch 0 (rank = 1, local_rank = 1) loss = 0.9288564920425415
[4103] epoch 0 (rank = 3, local_rank = 3) loss = 0.9711472988128662
[4102] epoch 0 (rank = 2, local_rank = 2) loss = 1.0727070569992065
[4100] epoch 0 (rank = 0, local_rank = 0) loss = 0.9402943253517151
[4100] epoch 1 (rank = 0, local_rank = 0) loss = 1.0327017307281494
[4101] epoch 1 (rank = 1, local_rank = 1) loss = 1.4485043287277222
[4103] epoch 1 (rank = 3, local_rank = 3) loss = 1.0959293842315674
[4102] epoch 1 (rank = 2, local_rank = 2) loss = 1.0669530630111694
...
在node1上执行与上面相同的脚本
torchrun \
--nnodes=1:3\
--nproc_per_node=4\
--max_restarts=3\
--rdzv_id=1\
--rdzv_backend=c10d\
--rdzv_endpoint="192.0.0.1:1234"\
train_elastic.py
node1上结果如下:
-
2~5行:由于添加node1,当前执行的是2机8卡的分布式训练任务,因此WORLD_SIZE=8, LOCAL_WORLD_SIZE=4 -
6~9行:当前node1上workers的rank为rank4 ~rank7 -
13~20行: 由于node1是在node0上work训练到epoch35的时候加入的,因此其接着epoch 35开始训练
/workspace/DDP# sh run_elastic.sh
[696] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[697] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[695] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[694] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[697] (rank = 7, local_rank = 3) train worker starting...
[695] (rank = 5, local_rank = 1) train worker starting...
[694] (rank = 4, local_rank = 0) train worker starting...
[696] (rank = 6, local_rank = 2) train worker starting...
load checkpoint from checkpoint.ptload checkpoint from checkpoint.pt
load checkpoint from checkpoint.pt
load checkpoint from checkpoint.pt
[697] epoch 35 (rank = 7, local_rank = 3) loss = 1.1888569593429565
[694] epoch 35 (rank = 4, local_rank = 0) loss = 0.8916441202163696
[695] epoch 35 (rank = 5, local_rank = 1) loss = 1.5685604810714722
[696] epoch 35 (rank = 6, local_rank = 2) loss = 1.11683189868927
[696] epoch 36 (rank = 6, local_rank = 2) loss = 1.3724170923233032
[694] epoch 36 (rank = 4, local_rank = 0) loss = 1.061527967453003
[695] epoch 36 (rank = 5, local_rank = 1) loss = 0.96876460313797
[697] epoch 36 (rank = 7, local_rank = 3) loss = 0.8060566782951355
...
node0上结果如下:
-
6~9行: node0上的works在执行到epoch 35时,node1上执行了训练脚本,请求加入到训练任务中 -
10~13行:所有workers重新启动,由于添加了node1,当前执行的是2机8卡的分布式训练任务,因此WORLD_SIZE=8, LOCAL_WORLD_SIZE=4 -
14~17行:当前node1上works的rank为rank0~rank3 -
18~21行:加载checkpoint -
22~30行:接着checkpoint中的model、optimizer和epoch继续训练
...
[4100] epoch 35 (rank = 0, local_rank = 0) loss = 1.0746158361434937
[4101] epoch 35 (rank = 1, local_rank = 1) loss = 1.1712706089019775
[4103] epoch 35 (rank = 3, local_rank = 3) loss = 1.1774182319641113
[4102] epoch 35 (rank = 2, local_rank = 2) loss = 1.0898035764694214
WARNING:torch.distributed.elastic.multiprocessing.api:Sending process 4100 closing signal SIGTERM
WARNING:torch.distributed.elastic.multiprocessing.api:Sending process 4101 closing signal SIGTERM
WARNING:torch.distributed.elastic.multiprocessing.api:Sending process 4102 closing signal SIGTERM
WARNING:torch.distributed.elastic.multiprocessing.api:Sending process 4103 closing signal SIGTERM
[4164] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[4165] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[4162] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[4163] Initializing process group with: {'MASTER_ADDR': '192.0.0.1', 'MASTER_PORT': '42913', 'WORLD_SIZE': '8', 'LOCAL_WORLD_SIZE': '4'}
[4162] (rank = 0, local_rank = 0) train worker starting...
[4163] (rank = 1, local_rank = 1) train worker starting...
[4164] (rank = 2, local_rank = 2) train worker starting...
[4165] (rank = 3, local_rank = 3) train worker starting...
load checkpoint from checkpoint.pt
load checkpoint from checkpoint.pt
load checkpoint from checkpoint.pt
load checkpoint from checkpoint.pt
[4165] epoch 35 (rank = 3, local_rank = 3) loss = 1.3437936305999756
[4162] epoch 35 (rank = 0, local_rank = 0) loss = 1.5693414211273193
[4163] epoch 35 (rank = 1, local_rank = 1) loss = 1.199862003326416
[4164] epoch 35 (rank = 2, local_rank = 2) loss = 1.0465545654296875
[4163] epoch 36 (rank = 1, local_rank = 1) loss = 0.9741991758346558
[4162] epoch 36 (rank = 0, local_rank = 0) loss = 1.3609280586242676
[4164] epoch 36 (rank = 2, local_rank = 2) loss = 0.9585908055305481
[4165] epoch 36 (rank = 3, local_rank = 3) loss = 0.9169824123382568
...
公众号后台回复“CVPR2022”获取论文分类合集下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~



