深入理解virtual关键字

引言
为什么需要virtual
class Point2d {public:Point2d(int x = 0, int y = 0): _x(x), _y(y) {}void print() const { printf("Point2d(%d, %d)\n", _x, _y); }protected:int _x;int _y;};class Point3d : public Point2d {public:Point3d(int x = 0, int y = 0, int z = 0):Point2d(x, y), _z(z) {}void print() const { printf("Point3d(%d, %d, %d)\n", _x, _y, _z); }protected:int _z;};int main() {Point2d point2d;Point3d point3d;point2d.print(); //outputs: Point2d(0, 0)point3d.print(); //outputs: Point3d(0, 0, 0)return 0;}
void print(const Point2d &point) {point.print();}int main() {Point2d point2d;Point3d point3d;print(point2d); //outputs: Point2d(0, 0)print(point3d); //outputs: Point2d(0, 0)return 0;}
class Point2d {public:virtual void print() const { printf("Point2d(%d, %d)\n", _x, _y); }};int main() {Point2d point2d;Point3d point3d;print(point2d); //outputs: Point2d(0, 0)print(point3d); //outputs: Point3d(0, 0, 0)return 0;}
类的内存布局
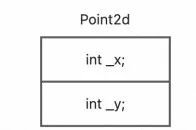
内存布局需要我们注意的是编译器对内存的对齐方式,内存对齐一般分两步:其一是类成员先按自身大小对齐,其二是类按最大成员大小对齐。我们在安排类成员的时候,应该遵循成员从大到小的顺序声明,这样可以避免不必要的内存填充,节省内存占用。
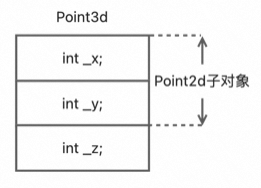
派生类的内存布局
在c++的继承模型中,一个子类的内存大小,是其基类的数据成员加上其自己的数据成员大小的总和。大多数编译器对子类的内存布局是先安排基类的数据成员,然后是本身的数据成员。非virtual版本的Point3d的内存布局:
virtual类的内存布局
当Point2d声明了virtual函数后,对类对象产生了两点重大影响:一是类将产生一系列指向virtual functions的指针,放在表格之中,这个表格被称之为virtual table(vtbl)。二是类实例都被安插一个指针指向相关的virtual table,通常这个指针被称为vptr。为了示例需要,我们重新设计Point2d和Point3d实现:
class Point2d {public:Point2d(int x = 0, int y = 0): _x(x), _y(y) {}virtual void print() const { printf("Point2d(%d, %d)\n", _x, _y); }virtual int z() const { printf("Point2d get z: 0\n"); return 0; }virtual void z(int z) { printf("Point2d set z: %d\n", z); }protected:int _x;int _y;};class Point3d : public Point2d {public:Point3d(int x = 0, int y = 0, int z = 0):Point2d(x, y), _z(z) {}void print() const { printf("Point3d(%d, %d, %d)\n", _x, _y, _z); }int z() const { printf("Point3d get z: %d\n", _z); return _z; }void z(int z) { printf("Point3d set z: %d\n", z); _z = z; }protected:int _z;};
大多数编译器把vptr安插在类实例的开始处,现在我们来看看virtual版本的Point2d和Point3d的内存布局:
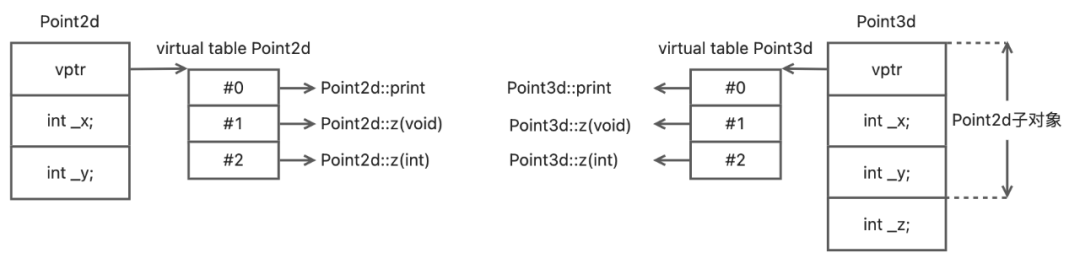
真实内存布局是否如上图所示,很简单,我们一验便知:
int main() {typedef void (*VF1) (Point2d*);typedef void (*VF2) (Point2d*, int);Point2d point2d(11, 22);intptr_t *vtbl2d = (intptr_t*)*(intptr_t*)&point2d;((VF1)vtbl2d[0])(&point2d); //outputs: Point2d(11, 22)((VF1)vtbl2d[1])(&point2d); //outputs: Point2d get z: 0((VF2)vtbl2d[2])(&point2d, 33); //outputs: Point2d set z: 33Point3d point3d(44, 55, 66);intptr_t *vtbl3d = (intptr_t*)*(intptr_t*)&point3d;((VF1)vtbl3d[0])(&point3d); //outputs: Point3d(44, 55, 66)((VF1)vtbl3d[1])(&point3d); //outputs: Point3d get z: 66((VF2)vtbl3d[2])(&point3d, 77); //outputs: Point3d set z: 77return 0;}
关键核心virtual table的获取在第5行,其实可以看成两步操作:intptr_t vptr2d = *(intptr_t*)&point2d;intptr_t *vtbl2d = (intptr_t*)vptr2d;第一步使vptr2d指向virtual table,第二步将指针转换为数组首地址。然后就可以用vtbl2d逐个调用虚函数。从输出结果看,程序确实逐个调用到对应的虚函数,virtual类的内存布局和先前我们所画结构图一致。
另一个有趣的地方是虚函数指针的定义,有没有让你联想到什么?你没想错,正是c++类this指针的存在:类成员函数里的this指针,其实是编译器将类实例的地址以第一个参数的形式传递进去的。和其他任何参数一样,this指针没有任何特别之处!
virtual析构函数
前文中我们都没设计析构函数,是因为要在这里单独讲解。让我们重新设计下继承体系,加入Point类:
class Point {public:~Point() { printf("~Point\n"); }};class Point2d : public Point {public:~Point2d() { printf("~Point2d"); }};class Point3d : public Point2d {public:~Point3d() { printf("~Point3d"); }};int main() {Point *p1 = new Point();Point *p2 = new Point2d();Point2d *p3 = new Point2d();Point2d *p4 = new Point3d();Point3d *p5 = new Point3d();delete p1; //outputs: ~Pointdelete p2; //outputs: ~Pointdelete p3; //outputs: ~Point2d~Pointdelete p4; //outputs: ~Point2d~Pointdelete p5; //outputs: ~Point3d~Point2d~Pointreturn 0;}
可以看到,非virtual析构函数版本,决定继承体系中析构函数链调用的因素是指针的声明类型:析构函数的调用从声明指针类型的类开始,依次调用其父类析构函数。现在我们把Point的析构函数声明为virtual,来看下同样调用的结果:
//除Point析构声明为virtual外,其余均不变int main() {Point *p1 = new Point();Point *p2 = new Point2d();Point2d *p3 = new Point2d();Point2d *p4 = new Point3d();Point3d *p5 = new Point3d();delete p1; //outputs: ~Pointdelete p2; //outputs: ~Point2d~Pointdelete p3; //outputs: ~Point2d~Pointdelete p4; //outputs: ~Point3d~Point2d~Pointdelete p5; //outputs: ~Point3d~Point2d~Pointreturn 0;}
virtual析构函数版本,决定继承体系中析构函数链调用的因素是指针的实际类型:析构函数的调用从指针指向的实际类型的类开始,依次调用其父类析构函数。
什么时候需要virtual
我看过项目中很多模块的代码,大量的类不管三七二十一都把析构函数声明为virtual。关键是这样的类既不是设计用于基类继承,也不是设计要使用多态能力,简直让人哭笑不得。现在你能理解为啥滥用virtual是不对的吗?因为在非必需的情况下,引入virtual实在不是一个明智的选择,它会带来两个明显的副作用:其一是每个类额外增加一个指针大小的内存占用,其二是函数调用多一层间接性。这两个特性会带来内存与性能的双重消耗。
其中内存的消耗是固定的一个指针大小,似乎看起来不起眼,但在类没有成员或者成员很少的情况下,就会带来100%以上的内存膨胀。性能的消耗则更加隐蔽,virtual会带来构造函数的强制合成,这点可能出乎很多人的意料。为何呢?因为虚表指针需要被安插妥当,因此编译器需要在类构造的时候做好这项工作。如果我们再声明一个虚析构函数,那将再引入一个非必要的合成函数,造成性能的双杀。让我们来瞧瞧这样做的后果:
struct Point2d {int _x, _y;};struct VPoint2d {virtual ~VPoint2d() {}int _x, _y;};template <typename T>T sum(const T &a, const T &b) {T result;result._x = a._x + b._x;result._y = a._y + b._y;return result;}template <typename T>void test(int times) {clock_t t1 = clock();for (int i = 0; i < times; ++i) {sum(T(), T());}clock_t t2 = clock();printf("clocks: %lu\n", t2 - t1);}int main() {test<Point2d>(1000000);test<VPoint2d>(1000000);return 0;}
假设将上面的代码存为demo.cpp,用clang++ -o demo demo.cpp将代码编译成demo,使用nm demo|grep Point2d查看所有相关符号:
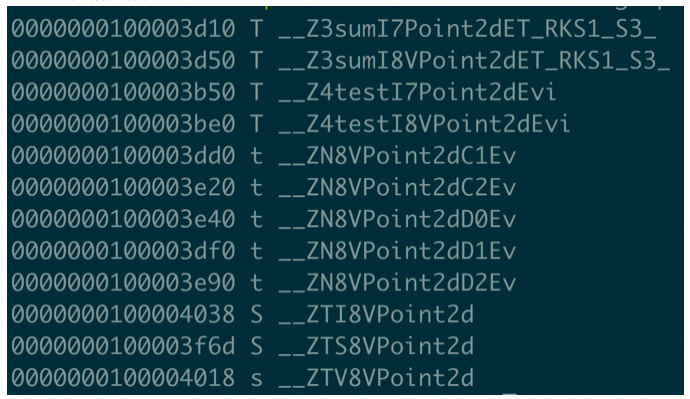
可以看到VPoint2d自动合成了构造和析构函数,以及typeinfo信息。作为对比Point2d则没有合成任何函数,我们看下两者的执行效率:在作者mac机器上,三次demo执行的结果取中间值是Point2d:12819,VPoint2d:21833,VPoint2d性能耗时增加了9014次clock,增幅达70.32%。
因此,一定不要随意引入virtual,一定不要随意引入virtual,一定不要随意引入virtual,除非你真正需要它:
2、基类指针指向子类实例的时候,需要使用virtual析构函数;
任何其他时候,virtual并没有其他你想要的任何魔力且会有反噬作用。其实还有一种情况需要virtual,就是virtual base class,由于这种情况太过于复杂,建议任何时候都不要去尝试它(可能需要另外一篇长文来解释为何不建议使用,本文暂且不表)。
结语
关于virtual的讲解至此结束,不多不少,不知对你来说是否够用。希望本文对你了解和使用virtual可以起到帮助作用。c++复杂且庞大,很多特性都有它使用的场景和限制,我们只有深入了解其背后的机制,才能做到"宠辱不惊,看庭前花开花落;去留无意,望天上云卷云舒;"。
最后,本文参考了《深度探索c++对象模型》一书。毋须多言,我觉得这是一本关于c++的必读书籍。希望大家有空都可以看看,一定会让你开卷有益、相见恨晚。
往期推荐
GTS云巧乘风者征文大赛等你来
投稿GTS云巧乘风者征文活动,有机会获得888元猫超卡和天猫精灵Sound~文章内容不限于云巧,只要运用了【组装式应用的理念】就可以投稿!
云巧及组装式应用理念是什么?云巧是“组装式应用”理念的落地,助力大家提升交付速度,提高交付质量,降低用工成本。
点击阅读原文查看详情。


