【泡泡一分钟】GraphMatch: SfM 系统中如何高效构建帧之间的匹配关系图(3DV-2)
每天一分钟,带你读遍机器人顶级会议文章
标题:GraphMatch: Efficient Large-Scale Graph Construction for Structure from Motion
作者:Cui Q, Fragoso V, Sweeney C, et al.
来源:3DV 2017
编译:鲁涛
播音员:刘畅
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是"GraphMatch: Efficient Large-Scale Graph Construction for Structure from Motion"——为大规模SfM任务高效构建图像帧之间的匹配关系图,该文章选自3DV 2017。
本文提出了GraphMatch,可在构建大规模SfM系统(运动恢复结构)时快速寻找图片之间的匹配关系。现代的SfM系统常用词汇树来快速构建匹配图,而本文的GraphMatch利用两个先验知识来预测匹配的图像对,这样不仅省去了离线构建词汇树的开销,同时还使得SfM系统中图像匹配的步骤更加高效。其中,第一个先验是通过计算图像对之间的Fisher向量距离得到的分数,第二个先验来自于潜在的匹配图中节点之间的距离。GraphMatch把这两个先验结合到类似于PatchMatch的“采样-传递”的策略中——采样阶段,用Fisher向量距离来指导获得匹配的图像对,传递阶段通过探索匹配的图像对的相邻节点来寻找新的匹配关系。
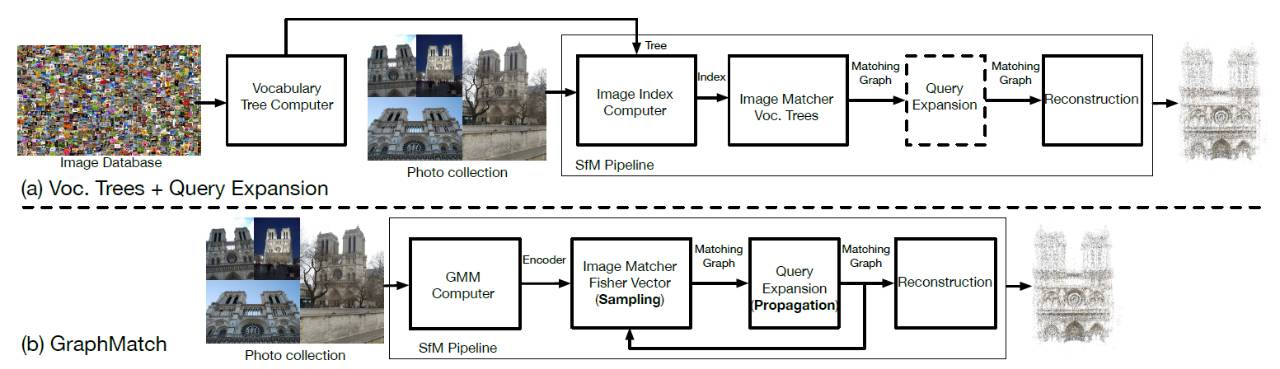
图1. (a)是经典方法的流程图,(b)为本文思路。
详细来说,全文共分为两个部分。
首先是预处理部分。作者提取了每张图像的SIFT特征点,并分别生成Fisher向量,然后根据这些向量为每张图片生成一个相似度列表,列表中从高到低列举了哪些图片有可能跟当前图片相似。这个列表主要是给后续的搜索提供个方向,避免盲目随机搜索。
然后是算法的主体部分,采样和传递迭代进行:
在采样环节中,利用前面的列表信息,每轮迭代时,从列表中抽取固定数量的候选图片,用于测试。当然,这里会特意选取那些相邻节点数量少于特定值的节点。测试成功之后,会更新关系图和列表信息。
传递环节中,作者主要是考虑,如果两个节点能匹配上的话,那么它们的相邻节点很可能也能匹配上。这一步会查询关系图中所有存在相连关系的节点。具体来说,假设节点A和B之间存在一条边,则检测A评分最高的一批相邻节点跟B是否可以相连,以此类推。
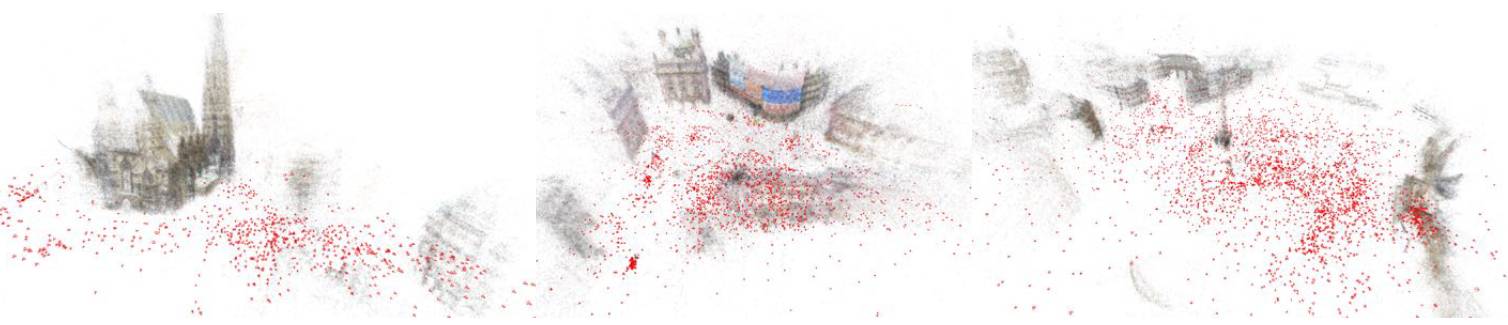
图2. 实验效果图
以上,就建立了SfM系统中的图像匹配关系图。实验表明,与其余有竞争力的近似方法相比,GraphMatch 找出了最多的匹配图像对,同时也是最高效的。
今天的泡泡一分钟就到这里了,如果你觉得有收获,欢迎转发到朋友圈,让更多人一起学习机器人顶级会议文章。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“GraphMatch”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



