在布里斯班“涨智慧”:NVIDIA在ICRA大会分享最新机器人研究成果
5月21-25日,世界机器人与自动化大会(ICRA, IEEE International Conference on Robotics and Automation)将于澳大利亚布里斯班召开。作为机器人背后的“大脑”,NVIDIA研究人员将在大会期间与您进行面对面交流,探讨机器人研究的最新成果。
自1984年以来,一年一度的ICRA已成为一个全球机器人研究工作者们展示其成果的重要论坛。
本届大会上,您将与NVIDIA团队围绕机器人研发的最新进展进行深入交流,了解NVIDIA GPU与人工智能如何推动自主机器实现飞跃。
包括大会演讲、海报论文研讨,以及两场晚间交流会等,ICRA将是您与机器人及自动化领域精英进行思想交锋的绝好机会。前往ICRA的7号和8号展台,联系我们的招聘团队,您还可以了解关于NVIDIA就业机会的更多信息。
机器人背后的“大脑”来啦!

5月21-22日,NVIDIA工程副总裁Claire Delaunay和领导NVIDIA机器人实验室的Dieter Fox将在福克斯酒店(Fox Hotel)主持晚间交流会。
Delaunay在机器人领域拥有超过10年的工作经验,她曾在初创公司、研究实验室与谷歌等各大公司负责机器人团队的领导工作。在加入NVIDIA机器人解决方案开发团队之前,她曾联合创办了Otto (该公司后被Uber收购),并担任工程总监。
Fox负责NVIDIA位于西雅图的机器人研究实验室。该实验室致力于开发能够熟练应对物理世界挑战并与人类自然互动的下一代机器人。他还负责华盛顿大学机器人状态估计实验室(Robotics and State Estimation Lab)的领导工作,该实验室集中研究与人工智能、计算机视觉及机器学习息息相关的机器人技术。
前沿机器人研究成果分享
在本周内,Fox及其团队将围绕以下课题进行探讨:
Re3: 用于通用对象可视化追踪的实时递归式网络
Re3: Real-Time Recurrent Regression Networks for Visual Tracking of Generic Objects
稳健的对象跟踪需要相关知识以及对被跟踪对象的理解,包含对其外观、运动及其如何随时间而变化的理解。跟踪器必须能够调整其基础模型,并适应新的观察结果。Re3是能够将时态信息嵌入其模型的实时深度对象跟踪器。
SE3-Pose-Nets: 可规划和控制视觉运动的结构化深度动态模型
SE3-Pose-Nets: Structured Deep Dynamics Models for Visuomotor Planning and Control
此项研讨介绍了一种使用结构化深度动态模型的深度视觉眼肌运动控制方法。我们的深度动态模型——SE3-Nets变体,现已学会了低维嵌入,以便通过编码器-解码器结构控制视觉眼肌运动。
综合训练神经网络,以便从真实演示中学会人类可读的规划
Synthetically Trained Neural Networks for Learning Human-Readable Plans from Real-World Demonstrations
此项研讨通过在真实世界的演示介绍了一种可推理并执行人类可读程序的系统。它包含一系列用于执行感知、生成程序与执行程序的神经网络。这些网络完全通过模拟方式进行训练,运用Baxter机器人,其系统还完成了“拾取-放置”堆叠彩色立方体问题的一系列真实世界测试。
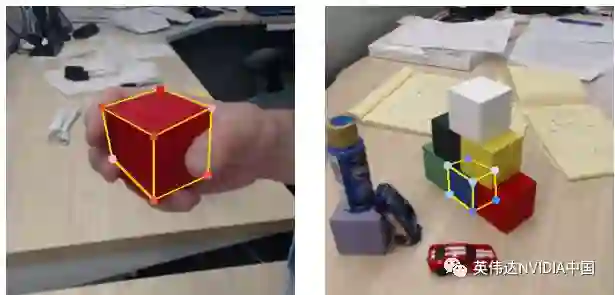
通过以图像为中心的域随机化(image-centricdomain randomization)进行对象探测的示例,显示出7个被探测的顶点
不容错过的JETSON交流会
当地时间5月21日19:30和5月22日18:30将召开两场NVIDIA JETSON交流会。届时,Delaunay、Fox与其他研究人员,以及我们的开发人员与合作伙伴将在现场分享NVIDIA研究成果与技术演示。参会者可在现场享受购买Jetson TX2开发者套件的特别折扣。

点击“阅读原文”,了解Jetson更多资讯。





